Daviteq Ultrasonic Level - Distance Measuring Technologies
Daviteq ULA Ultrasonic Level Sensor for Trash bin
1. Overview
Daviteq ULA ultrasonic level sensor is a dual-transducer ultrasonic sensor to measure the distance from the sensor surface to the object surface. Its design is dust and waterproof. Therefore the sensor can be installed in any trash bin for indoor and outdoor applications. With a very small blind zone (only 3 cm), it can be used for a small trash bin.
2. Detail measurement principle and its specification
It emits an ultrasonic pulse from the transmit transducer to the object, and the ultrasonic wave will reflect back to the receiving transducer. The micro-controller will measure the time difference between the sound wave from the transmitting transducer and the receiving reflected sound wave. From that, it calculates the distance by the following formula:
D = ( Time x V ) / 2
Where
D: Distance from the sensor to object surface
Time: the time difference between the wave from the transmitting transducer until receiving the reflected wave
V: velocity of ultrasonic wave in the environment.
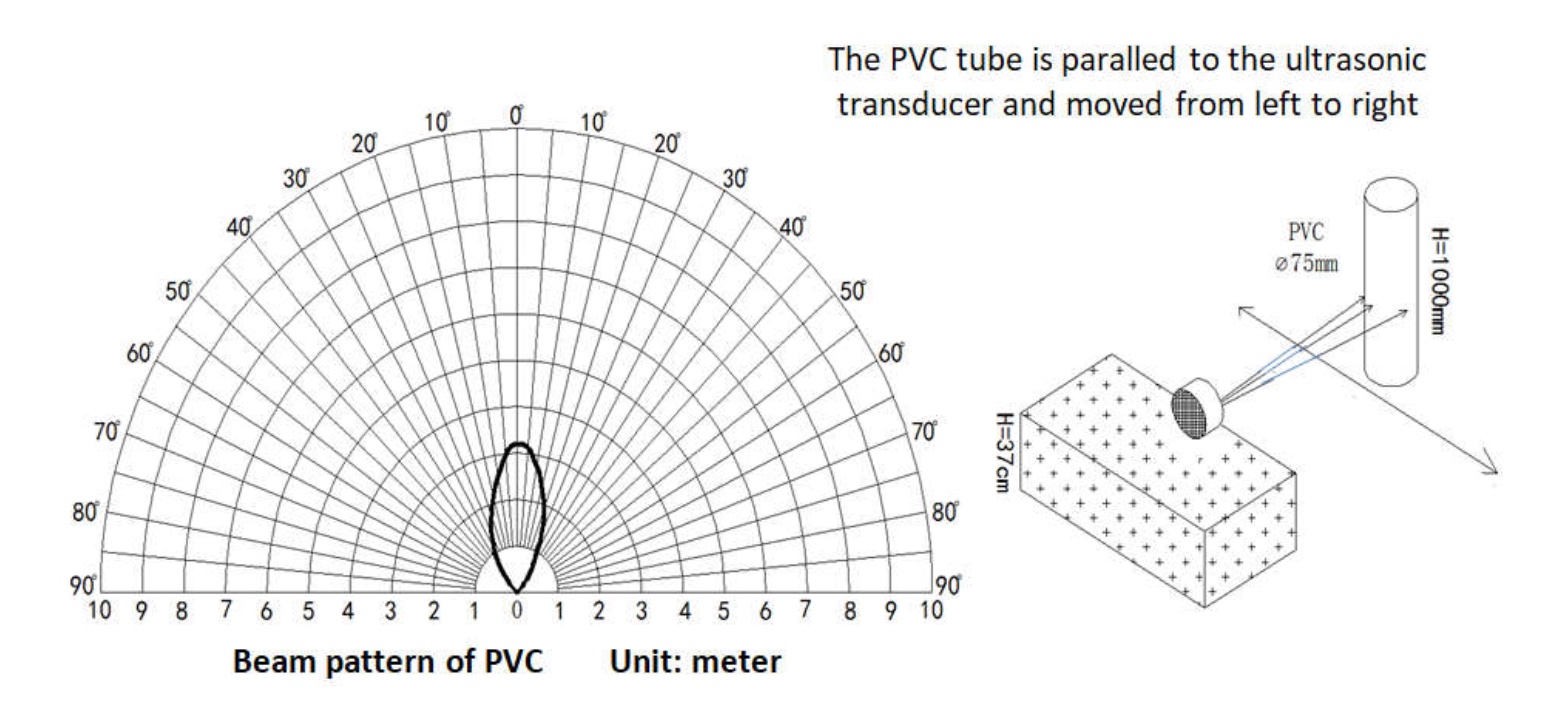
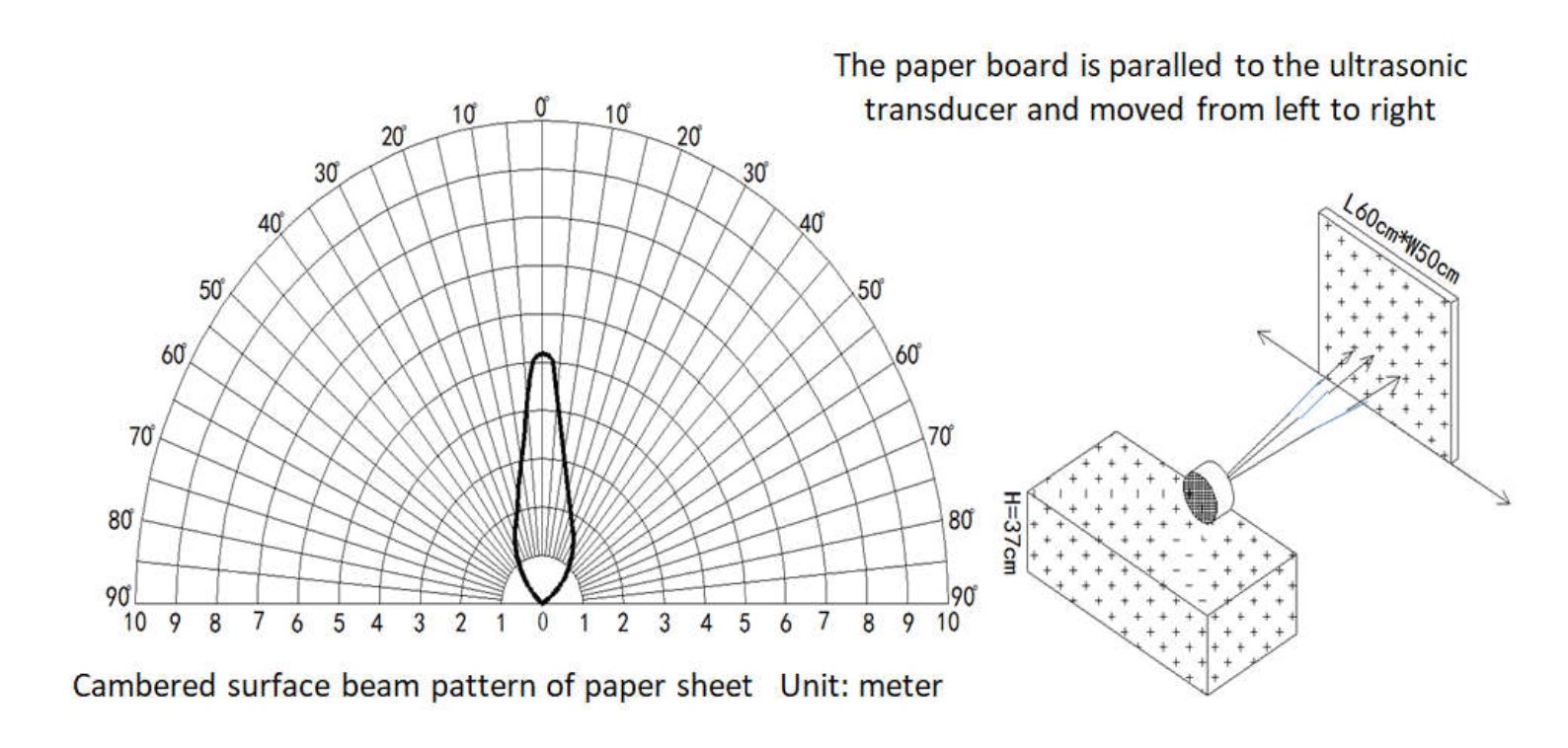
The effective detection range of the ULA sensor:
- The tested object is the white cylindrical tube, the material is PVC, height is 100cm, diameter is 75mm:
- The tested object is the carton board, placed in parallel with the sensor surface, carton board size is 60x50cm:
The smart firmware allows the sensor to filter the wrong echo signal from a rough surface in the trashbin so that it can deliver the accurate average distance or level value.
In addition, it also eliminates the wrong signal when the sensor is moving with the lid during opening (in a short time).
Note: The filter functions can be adjusted by changing the parameter Num_of_Samples. The higher value, the more effective filtering, the higher the energy consumption, and the shorter battery life.
ULA transducer specification
| Sensor technology | 40KHz Ultrasonic sensor |
| Blind zone | ~ 3 cm |
| Max detection range | ~ 450 cm (object is the carton board size 60x50cm, at 25 oC and 65% RH) |
| Working temperature/humidity | -15 .. + 60 oC / 0 - 99% RH (non-condensing) |
| Storage temperature/humidity | -25 .. + 80 oC / 0 - 99% RH (non-condensing) |
| Accuracy (at 25 oC, 65%RH) | +/- (1 cm + 0.5% of reading value) |
| Transducer material | Ceramic |
| Rating | IP68 (1m of water depth in 1h) |
3. Calibration of the Daviteq ULA ultrasonic level sensor
The Daviteq ULA ultrasonic level sensor measures the distance by taking the air speed of ultrasound in the ambient air. Therefore calibration is not required.
However, in most trash bin applications, customers need to get the level value (in ‰) instead of distance. To do so, please calculate the A & B value from the size of the trash bin as per the below instructions. DB: Dead band = 30 mm (This is a short range in front of the ultrasonic sensor can’t measure distances)
DB: Dead band = 30 mm (This is a short range in front of the ultrasonic sensor can’t measure distances)
H: The height from sensor head to trashbin bottom (Inner surface)
D: The value of LEVEL_MM parameter. (Distance from sensor head to trash surface)
L : The value of LEVEL_THOUSANDTHS parameter. (Ranging 0 ‰ to 1000 ‰)
How to determine H value?
- Method 1:
Based on the design drawing of the trash bin or actual measurement - Method 2:
Read the sensor's measurement value when the trash bin is empty (L0). Then H = L0
Note: a1, b1 of sensor must be as default when use Method 2. (Default value a1=1, b1=0)
How to determine the new coefficients A and B?
The calibration formula is L = a x D + b.
Calibration at 2 points: L=0(‰) when D=H and L=1000(‰) when D=DB
Therefore, the new coefficients A and B must be configured according to the formula:
A = 1000 / (DB - H)
B = (1000 x H) / (H - DB)
After that, use the offline tool or downlink to configure A & B to the sensor.
4. Application notes for the Daviteq ULA ultrasonic level sensor
The Daviteq ULA ultrasonic level sensor together with a wireless transmitter to be used in the following cases:
- To measure the filling level of waste in the trash bin with a height size from 45 to 450 cm;
- To measure the distance from the sensor to an object such as a wall, a door opening...
5. Installation notes
- Make sure the installation environment does not emit gases that harm the transducer (ceramic materials) or the device housing (usually made from Polycarbonate);
- Make sure the measured distance must be within the detection range of the sensor;
- Do not place the transducer upward to the sky for outdoor application as the rain drops can cause malfunctioning;
- Make sure there is no impact on the transducer surface; it will cause the transducer to get damaged;
- Do not install the sensor in the closed compartment with solvent vapor or steam; it will cause the wrong measurement.
6. Troubleshooting for the ULA Ultrasonic Level Sensor
| No. | Phenomena | Reason | Solutions | |
| 1 | The distance value always shows 28-30mm | 1.1 |
The object is very close to the sensor, within the blind zone of the sensor. |
Do nothing, it is the standard feature of the sensor. The sensor can only measure the distance from 3 cm to 450 cm. |
| 1.2 | The transducer is covered by a thick layer of dust or particles. |
Clean the transducer surface with a soft detergent and clean water. |
||
| 2 | The distance value always shows 450-500 cm | 2.1 | The object is too far away from the sensor, it is out of the detection range of the sensor. | Make sure the measuring distance must be within the detection range of the sensor, 3-450 cm |
| 3 | The distance/level value fluctuates largely. | 3.1 | The object's surface (waste) is not flat and very rough. | Try to increase the parameter Num_of_samples to increase the filtering so that the sensor can deliver a stable average value. But it will cause the battery life to be shorter. We recommend the Num_of_sample is <= 50. |
| 3.2 | The sensor is mounted on the movable lid of the trash bin, and the moving speed of the lid is too long. Normally, the time of opening and closing should be less than 10s. |
Check the moving speed of the lid and try to increase its speed. If not, please try to increase the parameter Num_of_samples to increase the filtering so that the sensor can deliver a stable average value. But it will cause the battery life to be shorter. We recommend the Num_of_sample is <= 50. |
||
| 4 | The distance/level value is fixed at an abnormal value. | 4.1 | The sensor is mounted on the movable lid of the trash bin, and the lid is stuck and stays at the opening position all the time. |
Check the lid of the trash bin. |
| 5 | The level value is not accurate with the actual level of waste in the trash bin. | 5.1 | The transducer is covered by a thin layer of dust or particles. |
Clean the transducer surface with a soft detergent and clean water. |
| 5.2 | The A & B parameters are wrong or not written to the sensor yet. |
Check the calculation of A&B again and make sure they are written successfully to the sensor. |
||
| 6 | HW_Error = 1 | 6.1 | The lost connection between the transducer and the main PCB. | Open the sensor housing and check the internal wire and connector from the transducer to the wireless PCB. |
| 6.2 | The transducer got a problem. | Please consult the manufacturer for a warranty or replacement. |
7. Maintenance of the ULA Ultrasonic Level Sensor
- There are no moving parts or consumed parts in the ULA ultrasonic level sensor. Therefore there is no need to do maintenance.
- However, depending on the installation environment, the transducer must be checked and cleaned periodically for accurate measurement.
8. Default configuration
This ULA Ultrasonic level sensor has the default configuration. The user can change the configuration on the wireless transmitter so that the complete sensor (transducer + wireless) delivers the proper output value. Below are some configuration parameters that store in the flash memory of the wireless transmitter.
| Description | Unit | Default | Format | Property | Comment |
| CONSTANT_A | 1 | Float | R/W |
Constant a for scaling measured value |
|
| CONSTANT_B | 0 | Float | R/W |
Constant b for scaling measured value |
|
| HIGH_CUT | 1E+09 | Float | R/W |
High cut value for scaled value |
|
| LOW_CUT | -1E+09 | Float | R/W |
Low cut value for scaled value |
|
| SENSOR_BOOT_TIME | mS | 500 | Uint32 | R/W |
Boot time of sensor/input, in ms |
| NUM_OF_SAMPLES | 30 | Uint16 | R/W |
Number of samples for filtering function |
END.