3. Advanced guide for WSNBM-AG
3.1 Principle of Operation
Daviteq CAT-M1/NB IoT Seismic Sensor comprises 03 parts linked internally:
• XY acceleration & XY tilt measurement module
• Device controller
• CAT-M1/NB IoT modem
3.1.2. The parameters in published topic name
- SKU: Device SKU, read from DEVICE_SKU parameter in the device memory, max 20 characters, data type of string.
- DEVICE NAME: Device name, read from DEVICE_NAME parameter in device memory, max 20 characters, data type of string.
- DEVICE SN: Device serial number, read from DEVICE_SN parameter in device memory, 20 characters, data type of string.
- DEVICE ALIAS: Device alias, read from DEVICE_ALIAS parameter in device memory, max 20 characters, data type of string.
- TOPIC TYPE: Fixed type of the topic. One of below topic type:
-
- STARTUP
- HEARBEAT
- CONFIG-HEALTH-CHECK
- FORCE
- CYCLE
- TILT-ALERT
- SHOCK-ALERT
- CONFIG-RECEIPT
- STARTUP
3.1.3. Primary output values in the payload of published topics
- Sampled Average X-Axis Tilt : Average X-axis tilt during the number of sample, unit of degree. This parameter is sampleAvgXTilt in the published topic's payload.
- Sampled Minimum X-Axis Tilt : Minimum X-axis tilt during the number of sample, unit of degree. This parameter is sampleMinXTilt in the published topic's payload.
- Sampled Maximum X-Axis Tilt : Maximum X-axis tilt during the number of sample, unit of degree. This parameter is sampleMaxXTilt in the published topic's payload.
- Sampled Average Y-Axis Tilt : Average Y-axis tilt during the number of sample, unit of degree. This parameter is sampleAvgYTilt in the published topic's payload.
- Sampled Minimum Y-Axis Tilt : Minimum Y-axis tilt during the number of sample, unit of degree. This parameter is sampleMinYTilt in the published topic's payload.
- Sampled Maximum Y-Axis Tilt : Maximum Y-axis tilt during the number of sample, unit of degree. This parameter is sampleMaxYTilt in the published topic's payload.
- Cycle Average X-Axis Tilt : Average X-axis tilt during a cycle, unit of degree. This parameter is cycleAvgXTilt in the published topic's payload.
- Cycle Minimum X-Axis Tilt : Minimum X-axis tilt during a cycle, unit of degree. This parameter is cycleMinXTilt in the published topic's payload.
- Cycle Maximum X-Axis Tilt : Maximum X-axis tilt during a cycle, unit of degree. This parameter is cycleMaxXTilt in the published topic's payload.
- Cycle Average Y-Axis Tilt : Average Y-axis tilt during a cycle, unit of degree. This parameter is cycleAvgYTilt in the published topic's payload.
- Cycle Minimum Y-Axis Tilt : Minimum Y-axis tilt during a cycle, unit of degree. This parameter is cycleMinYTilt in the published topic's payload.
- Cycle Maximum Y-Axis Tilt : Maximum Y-axis tilt during a cycle, unit of degree. This parameter is cycleMaxYTilt in the published topic's payload.
- X-Axis Tilt Difference: Difference between sampleAvgXTilt and referenceXTilt, unit of degree. This parameter is xTiltDifference in the published topic's payload.
- Y-Axis Tilt Difference: Difference between sampleAvgYTilt and referenceYTilt, unit of degree. This parameter is yTiltDifference in the published topic's payload.
- X-Axis Tilt Alert Status: X-axis tilt alert status (high, low, none). This parameter is xTiltAlertStatus in the published topic's payload.
- X-Axis Tilt Alert Period: Period of X-axis tilt alert, unit in millisecond. This parameter is xTiltAlertPeriod in the published topic's payload.
- X-Axis Tilt Alert Cycle Number: Number of X-axis tilt alert cycle. This parameter is xTiltAlertCycleNumber in the published topic's payload.
- Y-Axis Tilt Alert Status: Y-axis tilt alert status (high, low, none). This parameter is yTiltAlertStatus in the published topic's payload.
- Y-Axis Tilt Alert Period: Period of Y-axis tilt alert, unit in millisecond. This parameter is yTiltAlertPeriod in the published topic's payload.
- Y-Axis Tilt Alert Cycle Number: Number of Y-axis tilt alert cycle. This parameter is yTiltAlertCycleNumber in the published topic's payload.
- Measured X-Axis Acceleration: Measured X-axis acceleration, unit of mG. This parameter is measureXAcceleration in the published topic's payload.
- Measured Y-Axis Acceleration: Measured Y-axis acceleration, unit of mG. This parameter is measureYAcceleration in the published topic's payload.
- X-Axis Acceleration Alert Status: X-axis acceleration alert status (high, low, none). This parameter is xAccelerationAlertStatus in the published topic's payload.
- X-Axis Acceleration Alert Period: Period of X-axis acceleration alert, unit in millisecond. This parameter is xAccelerationAlertPeriod in the published topic's payload.
- X-Axis Acceleration Alert Cycle Number: Number of X-axis acceleration alert cycle. This parameter is xAccelerationAlertCycleNumber in the published topic's payload.
- Y-Axis Acceleration Alert Status: Y-axis acceleration alert status (high, low, none). This parameter is yAccelerationAlertStatus in the published topic's payload.
- Y-Axis Acceleration Alert Period: Period of Y-axis acceleration alert, unit in millisecond. This parameter is yAccelerationAlertPeriod in the published topic's payload.
- Y-Axis Acceleration Alert Cycle Number: Number of Y-axis acceleration alert cycle. This parameter is yAccelerationAlertCycleNumber in the published topic's payload.
3.1.4. Secondary output values in the payload of published topics
Below output values are useful for device maintenance and troubleshooting.
- Device Configurations: Full configuration of the device, hexadecimal. The configuration from address 4096 (decimal) and the length of 501 register (2004 hexadecimal value). This parameter is fullConfigurationString in the published topic's payload.
- Cellular Network Category: Cellular service mode (GSM/GPRS/EDGE/eMTC(CATM1), NB-IoT). This parameter is cellularServiceMode in the published topic's payload.
- RSSI: Received CAT-M1/NB IoT signal strength indicator, unit of dB. This parameter is RSSI in the published topic's payload.
- RSRP: Reference CAT-M1/NB IoT signal received power, unit of dB. This parameter is RSRP in the published topic's payload.
- SINR: CAT-M1/NB IoT signal to interference plus noise ratio. This parameter is SINR in the published topic's payload.
- RSRQ: Reference CAT-M1/NB IoT signal received quality, unit of dB. This parameter is RSRQ in the published topic's payload.
- MCU Temperature: MCU temperature, unit of degree. This parameter is mcuTemperature in the published topic's payload.
- Power Source: Status of device's power supply (on/off).
ON: device is powered directly by external power
OFF: device is powered by chargeable batteries. This parameter is powerSupplyStatus in the published topic's payload. - Configuration Start Address: Start address of the changed configuration, in decimal. This parameter is startAddress in the published topic's payload.
- Configuration Register Length: Register number of changed configuration, in decimal, max = 400 hexadecimal values. This parameter is registerLength in the published topic's payload.
- Configuration Requested Value: Requested value for the configuration change, in hexadecimal. If the value of startAddress or value of startAddress + registerLength are in Read Only area OR out of device memory map's range OR if the requestedValue does not match to registerLength or hexadecimal value, the requestedValue will be assigned to "FFFF". This parameter is requestedValue in the published topic's payload.
- Configuration Requested Validity: Validity of configuration's change request (Valid, Invalid). This parameter is requestValidity in the published topic's payload.
- Configuration Changed Value: If the change request is valid, the device configuration will be changed as request and changedValue will equal requestedValue. If the change request is invalid, the device configuration will NOT be changed, and the changedValue will be old value in hexadecimal value. If the value of startAddress or value of startAddress + registerLength are in Read Only area OR out of device memory map's range OR if the requestedValue does not match to registerLength or hexadecimal value, the requestedValue will be assigned to "FFFF". This parameter is changedValue in the published topic's payload.
3.1.5. The parameters in subscribed topic name
- SKU: Device SKU, read from DEVICE_SKU parameter in the device memory, max 20 characters, data type of string.
- DEVICE NAME: Device name, read from DEVICE_NAME parameter in device memory, max 20 characters, data type of string.
- DEVICE SN: Device serial number, read from DEVICE_SN parameter in device memory, 20 characters, data type of string.
- DEVICE ALIAS: Device alias, read from DEVICE_ALIAS parameter in device memory, max 20 characters, data type of string.
- TOPIC TYPE: Fixed type of the topic. The topic type is CONFIG-REQUEST, a request to change the parameter.
3.1.6. Parameters in the payload of subscribed topic name
- Subscribed Topic Type: Fixed type of the topic is CONFIG-REQUEST. This parameter is topicType in the published topic's payload.
- Epoch Time: Topic's Epoch Time format, unit of millisecond. This parameter is epochTime in the published topic's payload.
Device Serial Number: Device serial number. This parameter is deviceSerialNumber in the published topic's payload. - Start Address: Start address of the changed configuration, in decimal. This parameter is startAddress in the published topic's payload.
- Register Length: Register number of changed configuration, in decimal, max length = 400 hexadecimal value. This parameter is registerLength in the published topic's payload.
- Requested Value: Requested value for the configuration change, in hexadecimal. The length must be 4 hexadecimal values for 1 register, 8 hexadecimal values for 2 registers. This parameter is requestedValue in the published topic's payload.
3.1.7. Device operation principle description
The device measures the value of X/Y tilt every MEASUREMENT_CYLCE (Maximum MEASUREMENT_CYLCE is 10 milliseconds (100 Hz)). Based on tilt measured value, the device calculates moving (rolling) AVG, MIN, MAX during corresponding NUM_OF_NUMBER and the results are sampleAvgXTilt, sampleAvgYTilt, sampleMinXTilt, sampleMinYTilt, sampleMaxXTilt, sampleMaxYTilt parameters.
If difference between sampleAvgXTilt/sampleAvgYTilt and referenceXtilt/referenceYtilt are greater than corresponding DIFFERENCE_AVG_TILT_HIGH_ALARM_THRESHOLD or are less than DIFFERENCE_AVG_TILT_LOW_ALARM_THRESHOLD during corresponding SEQUENCE_NUM_FOR_HI_ALARM_ON, the device will publish first TILT-ALERT topic and TILT_ALARM_FLAG will be set to 1. During TILT_ALARM_PERIOD (fastest 1 minute) since first alarm, if difference between sampleAvgXTilt/sampleAvgYTilt and referenceXtilt/referenceYtilt return to the normal range during corresponding SEQUENCE_NUM_FOR_TILT_ALARM_OFF, the TILT_ALARM_FLAG will be set to 0. After TILT_ALARM_PERIOD, if TILT_ALARM_FLAG=1, the device will publish the second TILT-ALERT topic. The device handle tilt alarms for sampleAvgXTilt, sampleAvgYTilt separately. referenceXtilt/referenceYtilt are the values of sampleAvgXtilt/sampleAvgYtilt when SET_REF_POS_FOR_TILT_ALARM is set to 1. DIFFERENCE_AVG_TILT_HIGH_ALARM_THRESHOLD must be greater than DIFFERENCE_AVG_LOW_ALARM_THRESHOLD.
The device measures the value of X/Y accelerations every MEASUREMENT_CYLCE (Maximum MEASUREMENT_CYLCE is 10 milliseconds (100 Hz)) and the results are measureXAcceleration, measureYAcceleration parameters. If measureXAcceleration/measureYAcceleration are greater than corresponding ACCELERATION_HIGH_ALARM_THRESHOLD or less than corresponding ACCELERATION_LOW_ALARM_THRESHOLD during corresponding SEQUENCE_NUM_FOR_ACCELERATION_ALARM_ON, the device will publish first SHOCK- ALERT topic and ACCELERATION_ALARM_FLAG will be set to 1. During ACCELERATION_ALARM_PERIOD (fastest 1 minute) since first alarm, if measureXAcceleration/measureYAcceleration return to the normal acceleration range during corresponding SEQUENCE_NUM_FOR_ACCELERATION_ALARM_OFF, the ACCELERATION_ALARM_FLAG will be set to 0. After ACCELERATION_ALARM_PERIOD, if ACCELERATION_ALARM_FLAG=1, the device will publish the second SHOCK-ALERT topic. The device handle acceleration alarms for measureXAcceleration, measureYAcceleration separately.
The device publishes TILT alert, ACCELERATION alert, startup, heartbeat, config health check, force, cycle topic and config receipt topics. The sensor publishes the heartbeat topic, and cyclic data topic (fastest 1 minute) regularly. When the device is powered up, it publishes the startup topic. When the device is forced by magnetic key within 1 second the device publishes the force topic. When the device is forced by magnetic key within 5 second the device publishes the config health check topic. After the device subscribes to the config change request topic from the application, the device will publish the config receipt topic. When tilt/acceleration alert occurs, the device publishes corresponding alert topics.
The startup, heartbeat, the config health check topic contains information of current full configurations, and device health information. The force data topic contains information of device health information and Avg/Min/Max measured tilt during NUM_OF_SAMPLE. The cycle data contains information of device health information and measured Avg/Min/Max Tilt during a cycle. Config receipt topic includes configuration parameter address, the configuration parameter length, request to change configuration value, and changed configuration value.
Tilt alert topic includes information of sampleAvgX/YTilt, alert axis(X,Y), alert status (high, low none), alert period, number of alert cycle. Acceleration alert topic contains information of measureX/Yacceleration, alert axis, alert status (high, low, none), alert period, number of alert cycle.
1.3.8 Configuration for tilt alarm
Follow below steps to configure tilt alarm:
Step 1:
Enable alarm for X-axis tilt via offline or online :
- DIFFERENCE_AVG_X_TILT_ALARM_ENABLE = 1 to enable alarm
Chang the relevant settings for below configurations:
- DIFFERENCE_AVG_X_TILT_ALARM_PERIOD
- DIFFERENCE_AVG_X_TILT_HI_ALARM_THRESHOLD
- DIFFERENCE_AVG_X_TILT_SEQ_NUM_FOR_HI_ALARM_ON
- DIFFERENCE_AVG_X_TILT_SEQ_NUM_FOR_HI_ALARM_OFF
- DIFFERENCE_AVG_X_TILT_LOW_ALARM_THRESHOLD
- DIFFERENCE_AVG_X_TILT_SEQ_NUM_FOR_LOW_ALARM_ON
- DIFFERENCE_AVG_X_TILT_SEQ_NUM_FOR_LOW_ALARM_OFF
Refer the memory map at section 1.9 Payload Document and Configuration Tables for meaning of these configurations
Enable alarm for Y-axis tilt via offline or online :
- DIFFERENCE_AVG_X_TILT_ALARM_ENABLE = 1 to enable alarm
Change the relevant settings for below configurations:
- DIFFERENCE_AVG_Y_TILT_ALARM_PERIOD
- DIFFERENCE_AVG_Y_TILT_HI_ALARM_THRESHOLD
- DIFFERENCE_AVG_Y_TILT_SEQ_NUM_FOR_HI_ALARM_ON
- DIFFERENCE_AVG_Y_TILT_SEQ_NUM_FOR_HI_ALARM_OFF
- DIFFERENCE_AVG_Y_TILT_LOW_ALARM_THRESHOLD
- DIFFERENCE_AVG_Y_TILT_SEQ_NUM_FOR_LOW_ALARM_ON
- DIFFERENCE_AVG_Y_TILT_SEQ_NUM_FOR_LOW_ALARM_OFF
Refer the memory map at section 1.9 Payload Document and Configuration Tables for meaning of these configurations
Step 2:
Install the device at site
Step 3:
Write SET_REF_POS_FOR_TILT_ALARM =1 online or offline to set the current position as reference position to detect tilt alarm. After finishing, this setting will be back to 0 automatically. The alarm will be triggered based on the difference between the sampled tilts and referenced tilts.
3.1.9 Calibration for tilt
The tilt sensor is calibrated at 3 calibration positions:
1. X tilt and Y tilt equal 0 degrees.
2. X tilt equals +90 degrees.
3. Y tilt equals +90 degrees.
After fixing the device at above positions, please write the TILT_CALIB_ENABLE to 1 by offline or online (downlink ) to calibrate the sensor. After finishing, TILT_CALIB_ENABLE will be back to 0 automatically.
3.1.10 Offset the tilt value
Enable to offset X tilt and Y tilt value at current position to 0 degrees by set OFFSET_TILT_ENABLE to 1. After finishing, this value will be back to 0 automatically. The offset function could be canceled by set OFFSET_TILT_ENABLE to 2. After finishing, this value will be back to 0 automatically.
Please check the Payload document to understand clearly about uplink messages, downlink messages, meaning of parameters for configuration...
3.2 Configuration
3.2.1. How to configure the device?
Sensor configuration can be configured in 02 methods:
Method 1: Online configuring via Subscribing CONFIG-REQUEST topic from MQTT Application.
Method 2: Offline configuring via Offline cable.
3.2.2 Which Parameters are configured?
Please check Part E. MEMORY MAP in Section 1.9 Payload Documents above.
3.2.3 Online configuring via subscribing CONFIG-REQUEST topic from MQTT Application.
Please refer Part C. SUBSCRIBE TOPIC in Section 1.9 Payload Documents above.
3.2.4 Offline configuring via Offline cable.
Please download the Configuration Template File of this sensor to be used in Step 4 below.
Click Download CSV file to download the Configuration Template File
Instructions for offline configuration of the Seismic sensors. Please follow the following steps.
Prepare equipment and tools
The following items must be prepared for configuration.
- A PC using the Windows OS (Windows 7 or above versions). The PC installed the COM port driver of the Modbus configuration cable (if needed). The driver is at link: Modbus Configuration Cable COM port driver for PC and the instruction to install the driver at link: How to install the driver.
- A Modbus configuration cable
- A M12-CAB-CONFIG cable
Download and launch Modbus configuration software
-
Click the link below to download Modbus configuration software:
Click Modbus configuration software to download the software
After downloading the software, unzip the file named Modbus Configuration.zip and then copy the extracted folder to the storage drive for long-term use.
-
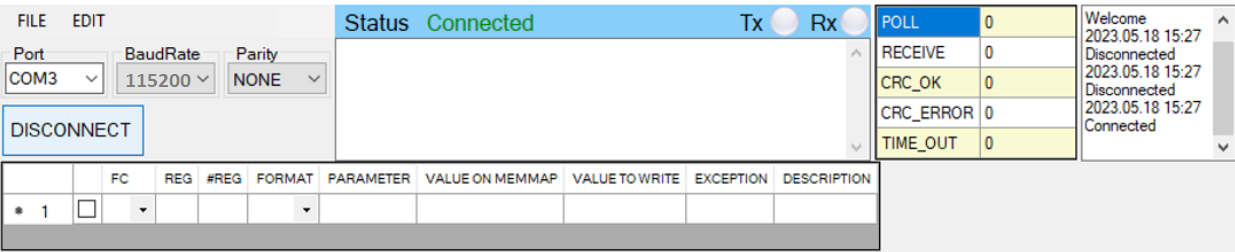
Open the folder, double click on the file Modbus Configuration Tool Version.exe to launch the software and the software interface as below:

Note: The software only runs on Microsoft Windows OS (Windows 7 and above)
Connect the cable and configure the sensor
Step 1:
Connect the PC to the Battery Pack using the configuration cable and converter cable
- Use the configuration cable (Item code: TTL-LRW-USB-01).

- Connect the USB-A plug into the USB-A socket of the PC.

Step 2:
On the configuration software, choose the relevant Port (the USB port which is the cable plugged in) and set the BaudRate: 115200, Parity: none
Step 3:
Step 4:
Import the configuration template file of the sensor (as above link) to the software: click menu File/ Import New and then browse the relevant sensor template file (csv file) and click Open to import the template file.
Each sensor type has its own template file. Refer to the sensor's manual to download the correct file.
Step 5: Open the housing of the sensor and quickly plug the connector of the configuration cable into sensor's modbus configuration port. After plugging the connector, the software will read the parameter values automatically.
 - Open the housing of the sensor. |
.jpg) - Plug the cable connector into sensor's Modbus configuration port. Note: this port is located at a different location, depends on the sensor type |
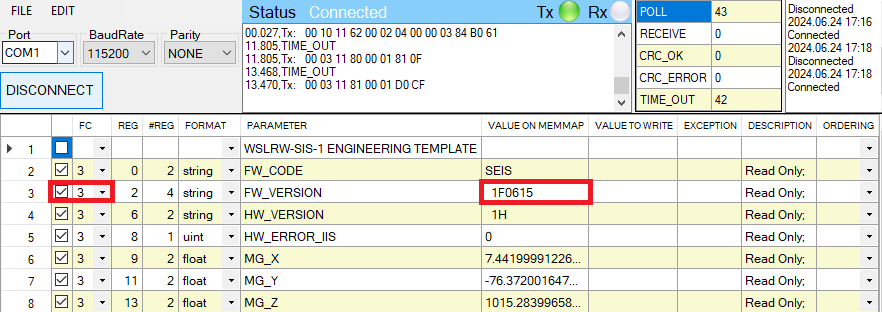
Step 6: Read the current value of the parameter with function 3
- At the relevant row of the parameter, check box 3 on column FC to read the value of the parameter. The read value is shown on VALUE ON MEMMAP column.
Step 7: Write the new setting to the parameter with function 16
- Double click on the column VALUE TO WRITE of the parameter and input the new setting of the parameter
- Uncheck the tick on the FC column of the parameter, click on the arrow, select 16 and then check on the FC column to write a new setting to the parameter. The WRITE_OK text will show on EXCEPTION column if the software successfully writes the setting.
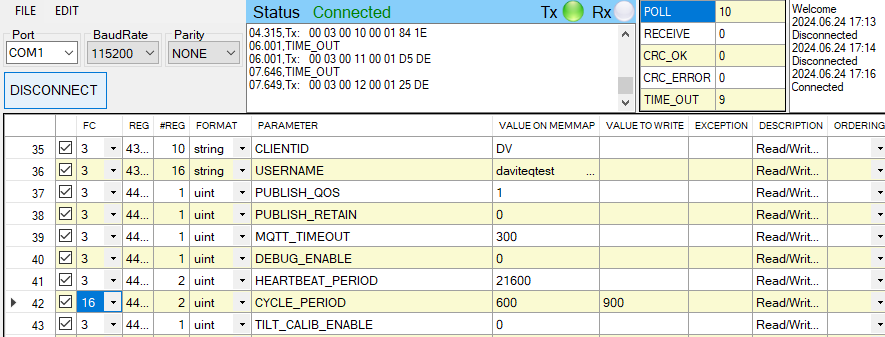
- Repeat step 6 to read the setting of the parameter for checking.
For some critical parameters of the sensor, the password in "password for setting" must be written before writing the new settings to these parameters.
Only read/write registers are allowed to write.
Troubleshooting of offline configuration
| No. | Phenomena | Reason | Solution |
|---|---|---|---|
| 1 | The status on the software always shows Disconnected although the configuration cable is connected to the PC | The selected COM port is incorrect | Select the correct COM port to which the configuration cable connects to PC |
| The configuration cable is defective | Check the configuration cable | ||
| 2 | The software reads no value after importing the right template and connecting the right cable. | The cable is defective or lost connection | Check or replace the new configuration cable |
| The USB port is defective | Check USB port | ||
| There is no power supply to the sensor via configuration cable | Check the power line of the cable | ||
| The sensor or sensor port is defective | Check the sensor and sensor port | ||
| 3 | No COM port appears in the Port list | No configuration cable is plugged into the PC | Plug the cable to the PC |
| The cable driver is not installed on the PC | Install the driver for the PC | ||
| 4 | The parameter table on the software is empty | The template file has not been imported | Click menu File and sub-menu Import New to import the template file |
| 5 | The parameter table on the software does NOT match the memory map table of the sensor. | The wrong template file was imported. | Go to the correct manual page of the product and download the right template file, then import the template file into the software. |
3.3 Calibration/ Validation
3.3.1 How to force sensor to send data for calibration
The device can be triggered to send data to the gateway immediately by using the magnetic key to touch the reed switch point on the housing within 1 second as below figures:


Note:
Upon transmitting the data to the gateway using the magnetic key, the timer for the transmission time interval will be reset.
The minimum time interval between two manual triggers is 15 seconds. If the interval is less than 15 seconds, data transmission will not occur.
3.3.2 Calibration for tilt
The tilt sensor is calibrated at 3 calibration positions:
1. X tilt and Y tilt equal 0 degrees.
2. X tilt equals +90 degrees.
3. Y tilt equals +90 degrees.
After fixing the device at above positions, write the TILT_CALIB_ENABLE to 1 by offline or online to calibrate the sensor. After finishing, TILT_CALIB_ENABLE will be back to 0 automatically.
No Comments