Daviteq LPC Lidar People Counter - Measurement Principle
1. Overview
Daviteq Lidar People Counter is a sensor with static lidar sensor with advanced and ultra-low-power MCU to perform the counting algorithm.
To detect a person passing thru the gate, it uses lidar to measure the distance from the sensor to the object. As the changes in distance, it will understand a person passing thru the gate. Moreover, it can distinguish the direction of movement.
Precise counting with ultra-low-power to save energy is a big challenge with Lidar technology. Therefore, Daviteq engineers had a smart decision to put the PIR sensor so that the sensor can wake up to count when there is human reach the sensor, in the Field of view (FOV) of the PIR Sensor. When there is no moving human body in the FOV of the PIR sensor, the sensor will go to sleep mode for energy saving. When it detects the moving human body, it will wake up immediately to count people, the delay time of wake up is about 20ms.
When there is no moving human body, it will fall back to sleep mode within 20ms.
2. Detail measurement principle
Counting people with this Lidar sensor consists of using the multiple zones of the sensor receiving area, and configuring it with two distinct fields of view (FoV), to alternatively get a ranging distance from them and consequently recognize the movements of a person. Using this method, the number of people occupying a meeting room, accessible from reasonably narrow access, is known at all times by detecting the entrances and exits of the attendees.
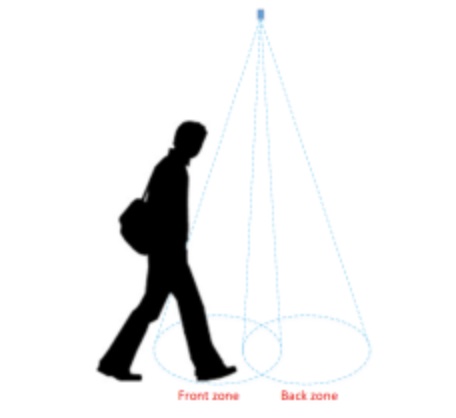
By measuring and analyzing the distances of targets within the FoVs of a front and back zone (see figure below), an algorithm can detect the direction a person crosses the area under the two FoVs. This algorithm "understands" that someone is under one of the FoV as long as the distance measured by the sensor under this FoV is between 0 and a threshold value specified in mm.
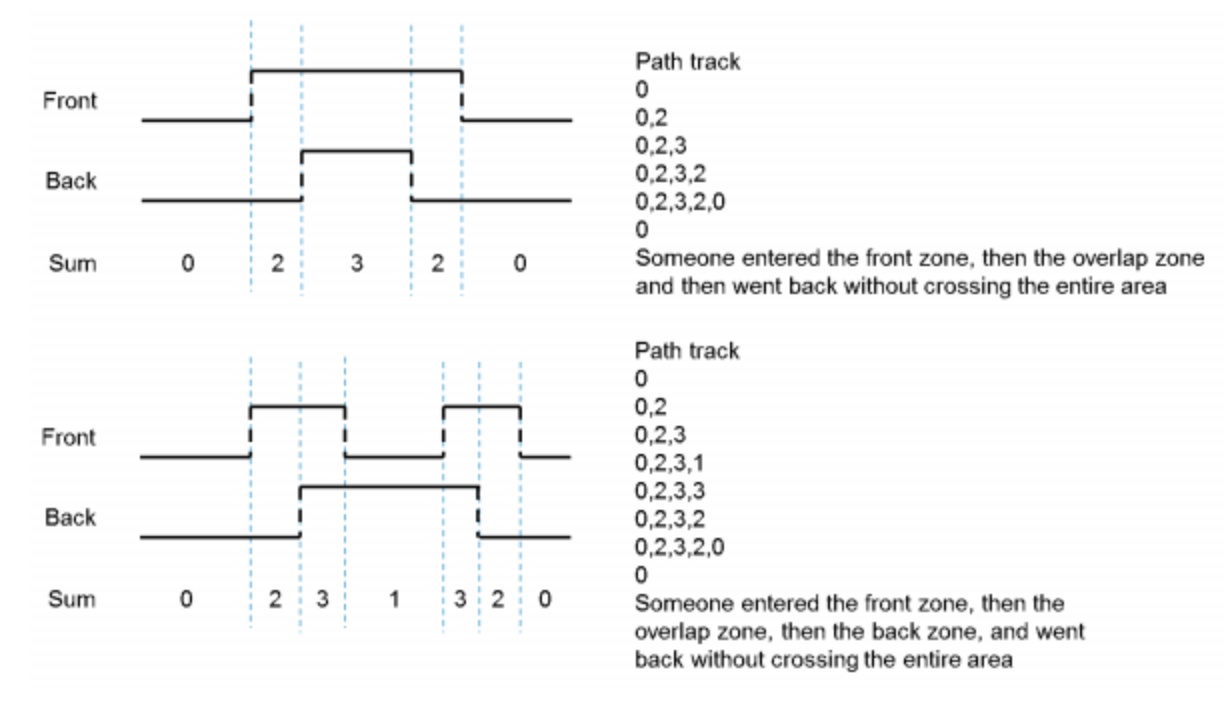
From a timing perspective, the sensor alternatively ranges on each of the two zones, for a very short period of milliseconds. It is possible to determine in which direction a person crosses the area, depending on in which order this person has been detected in the two zones, as shown in the figure below.

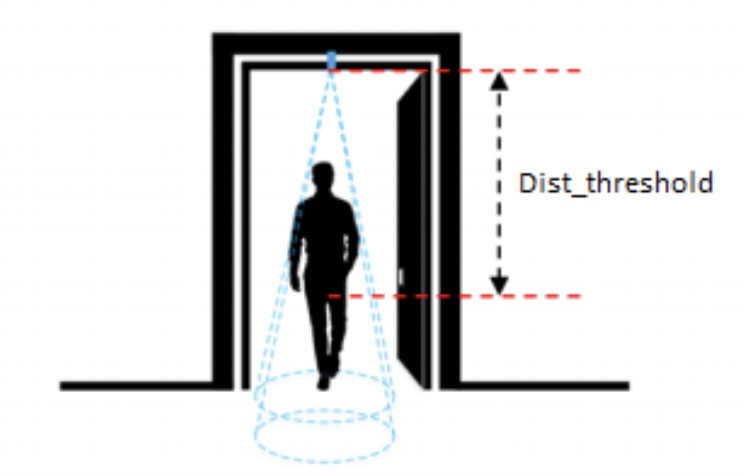
Dist_threshold mechanism
- The sensor will measure the distance from the sensor (on the ceiling) to the floor, when there is an obstacle, the person is under the sensor, the sensor will measure the distance from the sensor to the obstacle, and that person => will get the DistX value
- When DistX < Dist_threshold, the sensor detects that someone is standing below
- When DistX > Dist_threshold + dist_hys, the sensor confirms that no one is under
Counting Hysteresis
The algorithm validates a crossing event only when a person has fully crossed the two zones. It does not validate the event when the person remains for a long time under the FoV or when the person decides to return from the place he came from, and hence the counting values are not changed.
3. Commissioning (calibration) the Daviteq Lidar People Counter
Commissioning the sensor is an important step to getting the sensor working properly.
The Lidar FOV is 27 degrees and the max distance is 3500mm, so please check the width and height dimensions of the gate so that the person must be within the FOV;
After that, checking the floor, the floor must be a flat and bright color. The very dark color (back or near-black color) floor can affect the distance measurement accuracy. In this case, using a light color carpet to gain accuracy;
The reliability of the algorithm relies on the accuracy of the setup which detects the distance between the sensor and the floor. This can be ensured only if nothing (e.g. no obstacle or static object) blocks the front and back FoVs. To assess if a setup is reliable, a significant number of distances can be measured with the sensor. Then, a histogram diagram can be established to confirm that the sensor is correctly set up and that no target is within its FoVs.
A threshold needs to be defined, which is achieved after having ranged the flooring material over a significant number of samples. In fact, the threshold should be chosen so that all the measured distances (when ranging the floor) are greater than this threshold. We recommend that at the installation of the application, the autocalibration routine is launched to calculate the threshold. This is because flooring material can be different in many locations.
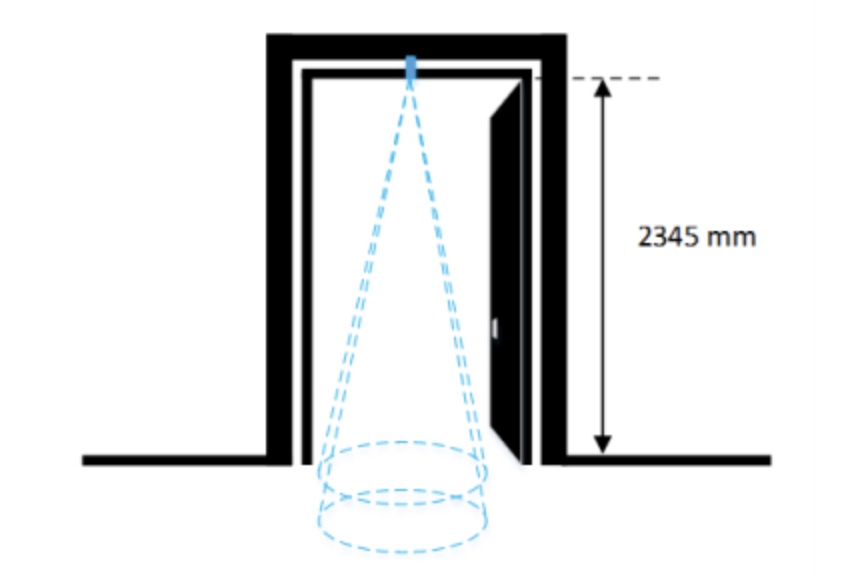
Figure 2.3: The distance between the sensor and the floor is 2345 mm, and as the minimum distance measured by the sensor is 2290 mm, the threshold is thus less than 2290 mm.
Notes:
- This calibration should be performed in the worst ambient light conditions, to maximize the jitter and obtain a threshold that is relevant to all possible ambient lighting conditions the counting setup is exposed to;
4. Application notes for Daviteq Lidar People Counter
The Daviteq Lidar People Counter can be used to count people using the public toilet or going to a store, office room, or meeting room…
The sensor will be mounted on the top of the gate or walkway with the sensor facing down to the floor. It can be used for the gate or walkway with dimensions as below:
- Width is from 700 to 1500mm
- Height is from 2000 to 3500mm
The sensor can count people passing thru the gate in both directions, it can distinguish the direction. However, if people walk too fast or run thru the gate, it cannot count that people, therefore the counting value will be missing.
* Walking speed limit: < 1.38 m/s (5 km/hr)
Notes:
- The sensor is intended for indoor application only, not applied for outdoor as the direct sunlight will saturate the measurement of the sensor.
- The color of the floor must be bright enough so that the laser ray can reflect the sensor. If the floor was too dark like dark brown, dark gray, or black color, the sensor would not work properly.
- The sensor can only count one person by one. If there were more than one person passing thru the gate at the same time or if they walk closely together, the sensor would count as one. Therefore, the counting value will be missing.
ATTENTION:
- DO NOT INSTALL THE SENSOR OUTDOOR OR INDOORS WITH HIGH INTENSITY OF SUNLIGHT;
- DO NOT INSTALL THE SENSOR AT A PLACE WHERE HIGH DUST PARTICLES OR STEAM AFFECT THE OPTICAL SENSOR;
- DO NOT INSTALL THE SENSOR AT A PLACE NEAR A DOOR AS THE DOOR WILL BLIND THE PIR SENSOR, IT WILL NOT WAKE UP THE SENSOR TO COUNT PEOPLE;
- DO NOT INSTALL THE SENSOR AT A PLACE WHERE THE PEOPLE MOVING IN PARALLEL AND NEARBY THE SENSOR, THAT WILL CAUSE THE SENSOR TO WAKE UP ALL THE TIME, BUT NOT FOR COUNTING PEOPLE. THIS PROBLEM WILL MAKE THE BATTERIES DRAIN OFF QUICKLY IN A FEW DAYS.
5. Troubleshooting for Daviteq Lidar People Counter
| No. | Phenomena | Reason | Solutions | |
| 1 | It does not count at all or the Count values are inaccurate | 1.1 | Low battery, the device does not run | Check battery |
| 1.2 | The PIR malfunctions, it cannot detect moving people to wake up the sensor | Put the ear nearby sensor to hear the sound of sizzling? if there is no sound, the PIR sensor or complete sensor got failure, please consult the manufacturer. | ||
| 1.3 | The walking speed to fast, higher than 1.38m/s | Walk at normal speed | ||
| 1.4 | The person does not walk in the FOV of the Lidar sensor (27 degrees cone) | Check the installation and dimension of the Gate | ||
| 1.5 | Wrong threshold setting | Commissioning the sensor again as part 3. | ||
| 1.6 | Sensor error, sensor error code is not Zero. | Please consult the manufacturer | ||
| 1.7 | The optical lens of the Lidar sensor got dirty or malfunction | Check and clean the optical lens with alcohol (70% volume) | ||
6. Maintenance of the sensor
This Lidar people counter comprises 02 optical parts:
- Lidar sensor with optical lense;
- PIR sensor with lense;
These 02 parts need to be checked and cleaned periodically, depending on the environment.
Use alcohol (70% volume) to clean the surface of the 2 above parts.
After cleaning, force the sensor to send data to check the distance values of the Front and Back zones to confirm the accuracy of distance measurement.
Do not use Acetone or other strong solvents to clean, it will destroy the surface of the sensor and cause malfunctions
7. Default configuration
Please find below the default configuration. You can change the configuration to suit the requirement of specific applications as in section 3 above.
| Description | Unit | Default | Format | Property | Comment |
| distThreshold | mm | 1600 | uint16 | Read / Write | Threshold setting for laser sensor to distinguish between when people are present and when no one is standing under the sensor The laser sensor will measure the distance value from the sensor (ceiling) to the floor.
|
| distHys | mm | 100 | uint16 | Read / Write | Hys of distThreshold |
| inter_meas_period | ms | 48 | uint16 | Read / Write | The sampling time of the sensor laser |
No Comments