USER GUIDE FOR ULTRASONIC LEVEL SENSOR FOR TRASH BIN WS433-ULA
| WS433-ULA-MN-EN-01 |
FEB-2022 |
This document is applied for the following products
|
SKU |
WS433-ULA |
HW Ver. |
2.5 |
FW Ver. |
6.01 |
|
Item Code |
WS433-ULA-01 |
Wireless Ultrasonic Level Sensor for Trash bin, Internal antenna, 4500mm range, Type AA battery 1.5VDC, IP67 |
|||
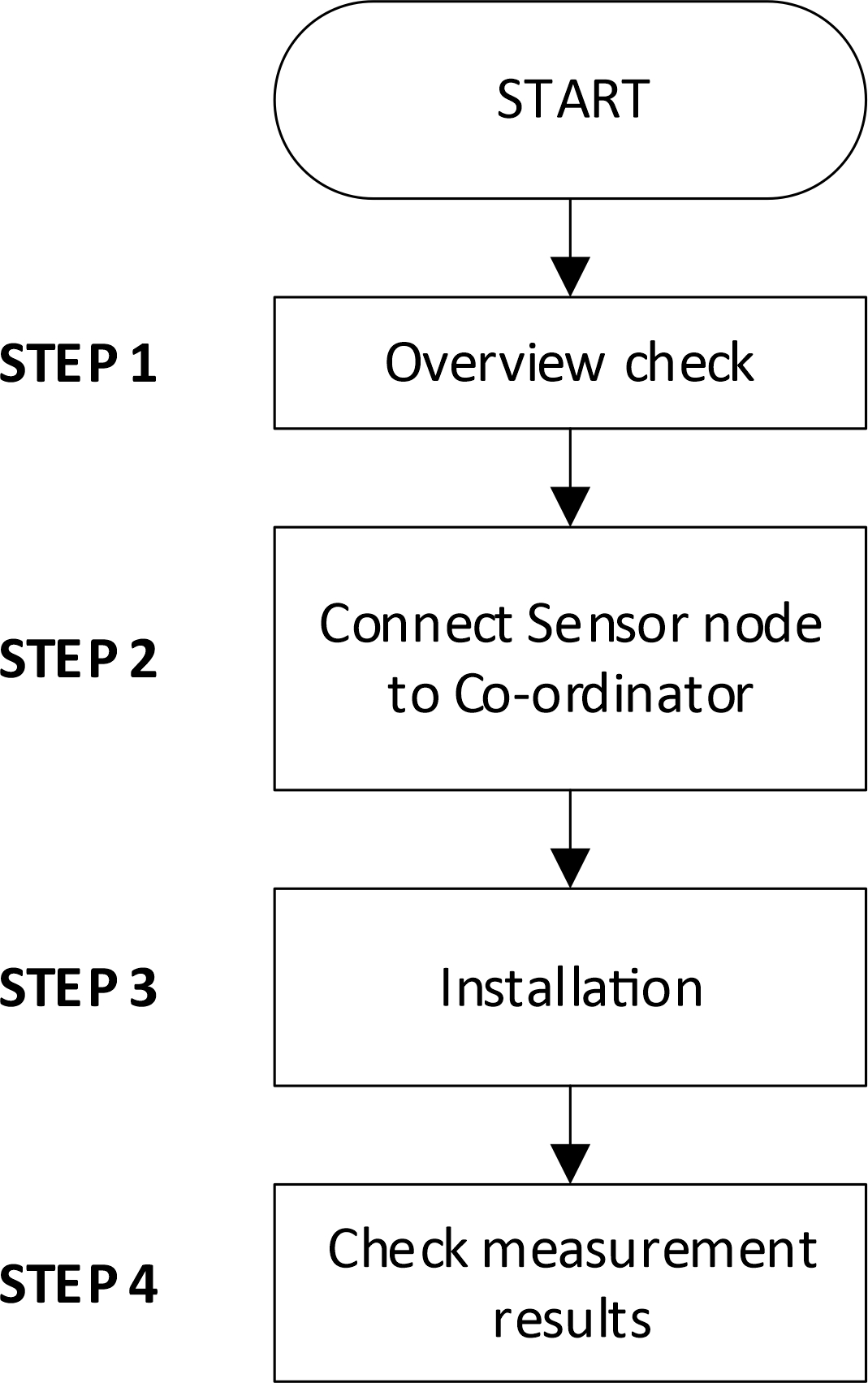
0. Configuration Check List
|
Step 1: Overview check |
|
|
Refer to section 5 for details |
|
Step 2: Connect Sensor node to Co-ordinator |
|
|
Refer to section 6.4 for details |
|
Step 3: Installation |
|
|
Refer to section 6 and section 7 for details |
| Step 4: Check measurement results | |
|
1. Functions Change Log
| HW Ver. | FW Ver. | Release Date | Functions Change |
| 2.5 | 6.01 | FEB-2022 |
|
2. Introduction
WS433-ULA is a ultrasonic level sensor to measure solid surface level in trash bin for waste management systems ... This level sensor uses ultrasonic technology to measure the solid surface of waste, the principle is to measure the time of flight of the ultrasound pulse in the air environment. The ultrasound pulse will be ejected from ultrasonic transducer, go thru the air and reach the solid surface of the waste, then reflected back to the ultrasonic transducer, the measuring circuit will measure the flight time of the pulse then calculated distance from the transducer to the surface. The sensor will connect wirelessly to the Wireless Coordinator WS433-CL then export the data to RS485 / modbusRTU and from there easily connect to any monitoring and control system. LOS distance from sensor to receiver is 1000m and can be extended by Extender. Typical applications include: Machine Health Monitoring, Predictive Maintenance Installations, Vibration Monitoring, Impact & Shock Monitoring, Bearing monitoring...

3. Specification
| SENSOR SPECIFICATION: | |
| Sensor | Ultrasonic sensor |
| Measurement range | 30 .. 1500 mm |
| Resolution & accuracy | 1.0mm, +/- 10 mm |
| Sensor sampling rate | configurable from 10s up to 3600s |
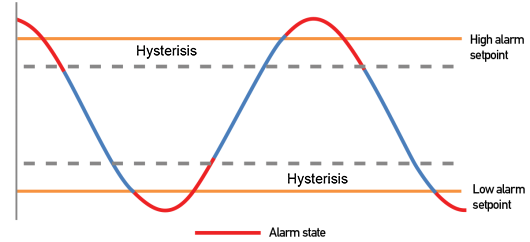
| Alarm setting | setting the alarm threshold for calculated value |
| WIRELESS SPECIFCATION: | |
| Data speed | Up to 50kbps |
| Tranmission distance, LOS | 1000m, internal Antenna |
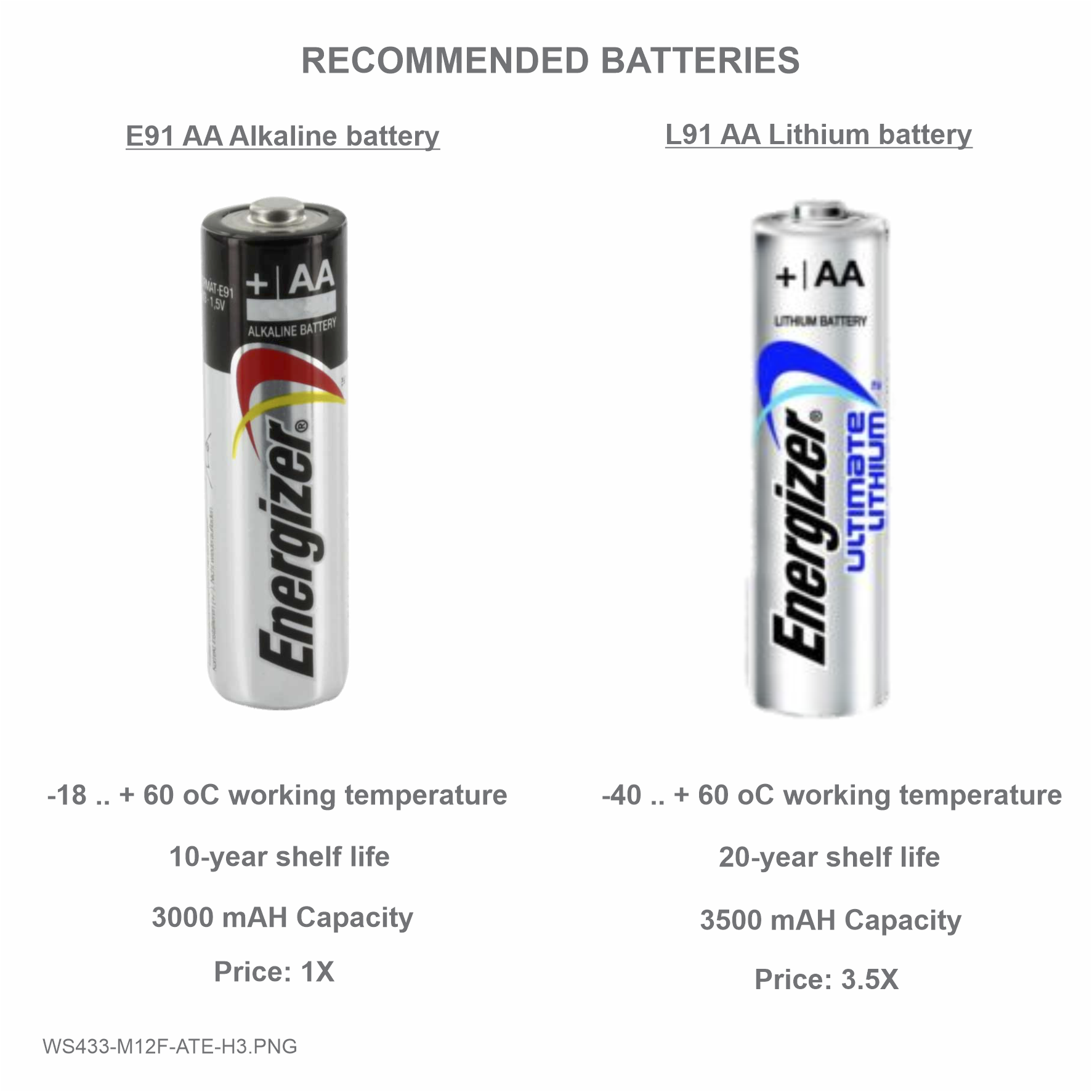
| Battery | 02 x AA 1.5VDC, up to 10-year operation, depends on configuration |
| Frequency Band | ISM 433Mhz, Sub-GHz technology from Texas Instrument, USA |
| International Compliance | ETSI EN 300 220, EN 303 204 (Europe) FCC CFR47 Part15 (US), ARIB STD-T108 (Japan) |
| Vietnam Type Approval Certification | QCVN 73:2013/BTTTT, QCVN 96:2015/BTTTT (DAVITEQ B00122019) |
| Security Standard | AES-128 |
| Operating temperature of PCB | -40°C..+60°C (with AA L91 Energizer) |
| Housing | Poly-carbonate, IP67 |
| Installation method | Integrated with Sensor |
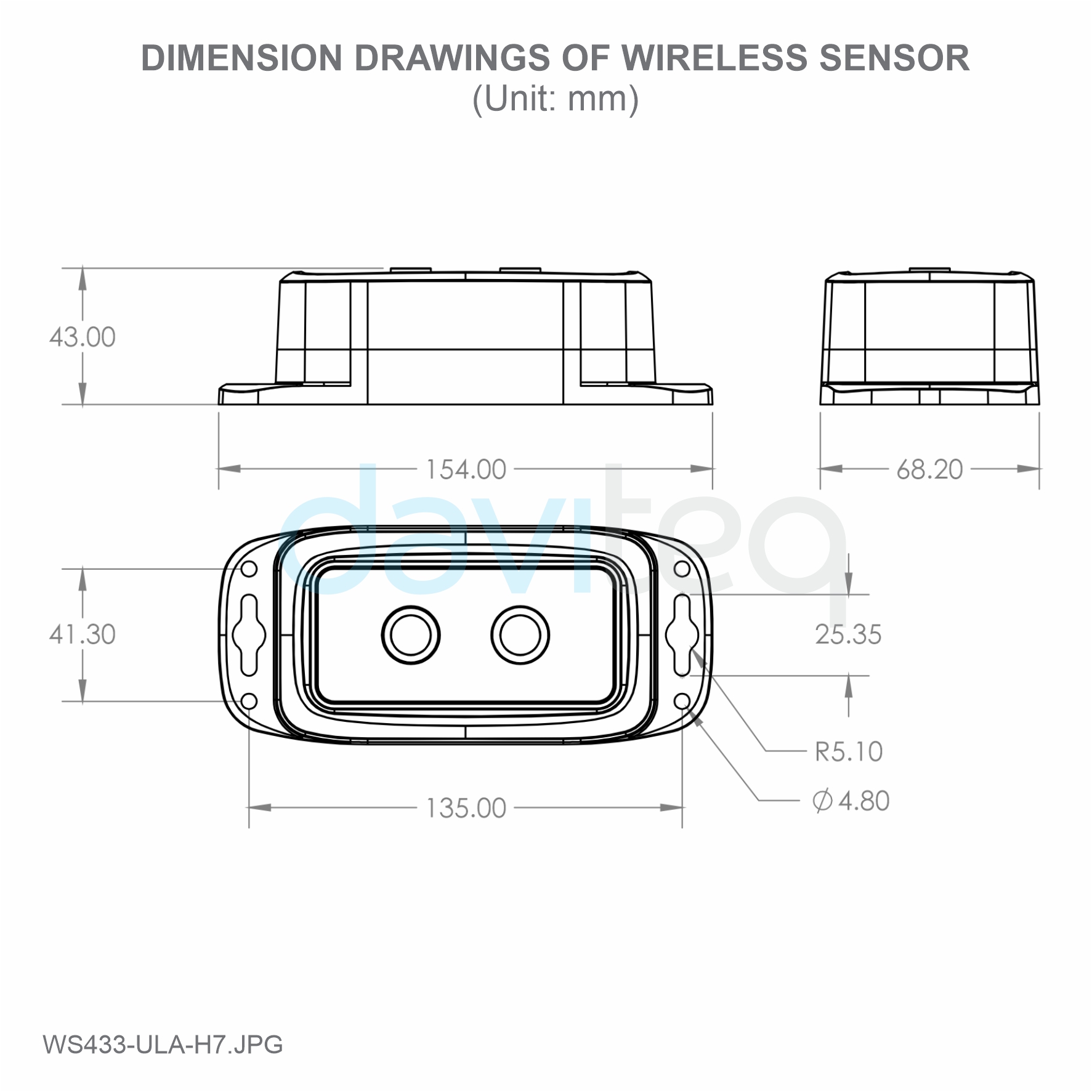
| Product dimensions & weight | 150x30x30mm, < 260g (without battery), with sensor |
| Box dimension & gross weight | 190x50x50mm, < 300g |
4. Dimensions
5. Scope of delivery
- Wireless ultrasonic level sensor
- Magnet key
- BTP1- PARTSKIT-ULA

6. Operation Principle
6.1 Process of measurement
When the sensor sampling time interval is reached, For example 2 minutes, the node will wake up and switch ON the power supply to supply the energy to external sensor to start the measurement. Depends on the type and characteristic of external sensor, the sensor will take a certain time to finish the measurement.
For example: the measurement time is 200mS, after this time, the node will read the value of sensor, node will switch OFF power supply to external sensor to save energy.
The measured value is the raw value of the sensor. The measured value can be scaled according to the following formula:
Y = aX + b
-
-
-
-
- X: the raw value from the sensor
- Y: the calculated value for parameter 1's value or parameter 2's value
- a: constant (default value is 1)
- b: constant (default value is 0)
-
-
-
So, if there is no user setting for a and b ==> Y = X
The Y value will be compared with Lo and Hi threshold. Please refer below the graph of alarm processing.
Status bytes of sensor Node
- Hi-Byte is error code
| Error code | Description |
| 0 | No error |
| 1 | Just exchange the sensor module but node has not been reset ==> please take out the battery for 20s then install it again to reset node to recognize the new sensor module |
| 2 | Error, sensor port M12F shorted to GND |
| 3 | Error, sensor port M12F shorted to Vcc |
| 4 | Error, sensor port M12F shorted each other |
- Lo-Byte is sensor type
| Error code | Description |
| 0 | No error |
| 1 | Just exchange the sensor module but node has not been reset ==> please take out the battery for 20s then install it again to reset node to recognize the new sensor module |
| 2 | Error, sensor port M12F shorted to GND |
| 3 | Error, sensor port M12F shorted to Vcc |
| 4 | Error, sensor port M12F shorted each other |
6.2 The Effective Detection Range

6.3 Range of measurement
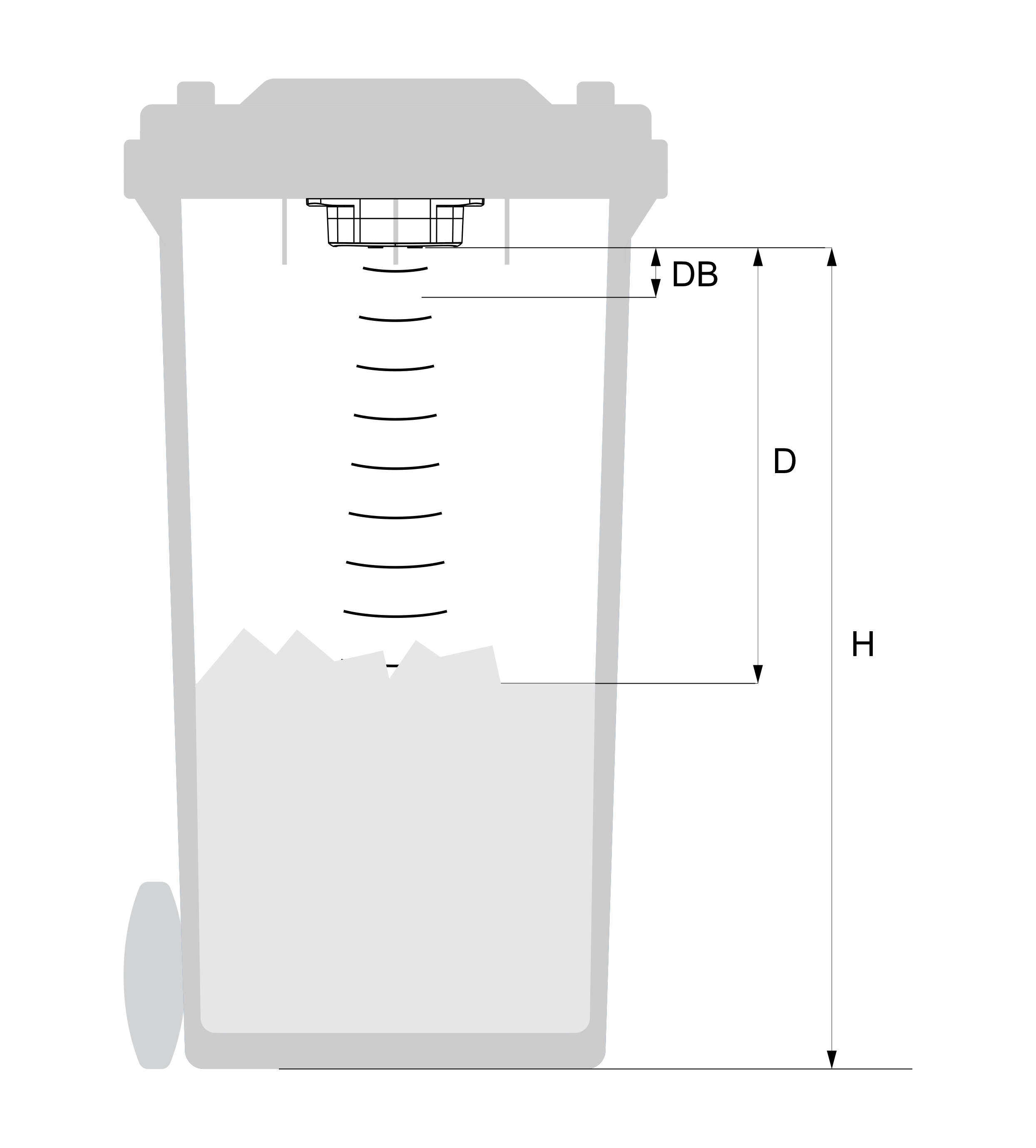
Figure – Ultrasonic Level Transmitter
- DB: Dead band 0..30 mm (This is a short range in front of the ultrasonic sensor can not measure distances)
- H: Maximum measuring distance 4500mm ( with flat object)
- D: Distance
6.4 Add sensors node to Co-ordinator WS433-CL
6.4.1 Add Sensor Node ID automatically
 |
 |
Step 1: After supplying power the Co-ordinator via M12 connector, the Node ID must be registered within the first 5 minutes, up to 40 WS.
Step 2: Bring the wireless sensor closer to the Co-ordinator's antenna then take off the wireless sensor battery, wait for 5s then insert the battery again. If:
- Buzzer plays 1 peep sound, LED blink 1 time, that means registering Node ID on Co-ordinator successfully.
- Buzzer plays 2 peep sounds, LED blink 2 times, that this Node ID is already registered.
If you do not hear the "Peep" sound, please disconnect the power the co-ordinator, wait a few minute and try again.
Node id added in this way will be written to the smallest node_id_n address which is = 0.
Set Rssi_threshold (see RF MODE CONFIG (in the Modbus Memmap of WS433-CL), default -25): The case if Co-ordinator is on high position and need to add node sensor. We set the sensor as close as possible and set the Rssi_threshold to -80, -90 or -100 to increase the sensitivity to allow WS433-CL-04 can add sensors at a longer distance. After that, perform 2 steps of adding sensors and then reset Rssi_threshold = -25.
Enb_auto_add_sensors configuration (see RF MODE CONFIG (in the Modbus Memmap of WS433-CL)): In case you do not want to turn off the power WS433-CL, you can set Enb_auto_add_sensors = 1, this way we have 5 minutes to add nodes (add up to 40 nodes) . After 5 minutes Enb_auto_add_sensors will automatically = 0.
Memmap resgisters
You can download Modbus Memmap of WS433-CL with the following link:
https://filerun.daviteq.com/wl/?id=BKEaUzdArkoc0Hc7nfpRShdPVToVrqQZ
6.4.2 Add sensor node into WS433-CL-04 (1) through intermediate WS433-CL-04 (2) and Modbus
In case the sensor need to be added to WS433-CL-04 (1) has been installed in a high position, the sensor cannot be brought close to WS433-CL-04 (1). For more details:
6.5 Magnet Function
Open the cover of sensor then use the magnet key to set the data transfer speed for the first 30 seconds when the battery is first installed, after 30 seconds the magnet key function does not work.

Get the magnet close to the magnet mark ![]() on the label . Then
on the label . Then
- Buzzer beep 1 time => Release the magnet to set Data rate RF 50kbps
- Buzzer beep 2 times => Release the magnet to set Data rate RF 625bps
- Buzzer beep 3 times => Release the magnet to reset RF parameters (frequency, RF output power, data rate), if held for more than 30 seconds then the magnet function does not work.
Reset default WS433:
Frequency: 433.92 MHz
RF transmit power: 15 dBm
RF data rate: 50 kbps
6.6 Configuration
First, you need to prepare

Num of Node will indicate the number of nodes managed by WS433-CL.
Every time a node is added, the Num of Node will increase by 1.
Every time a node is deleted, the Num of Node is reduced by 1.
Writing Num of Node = 0 will delete all 40 node ids to 0.
If you want to delete a node id, then write it = 0 with the Write function is 16 and the Read function is 3.
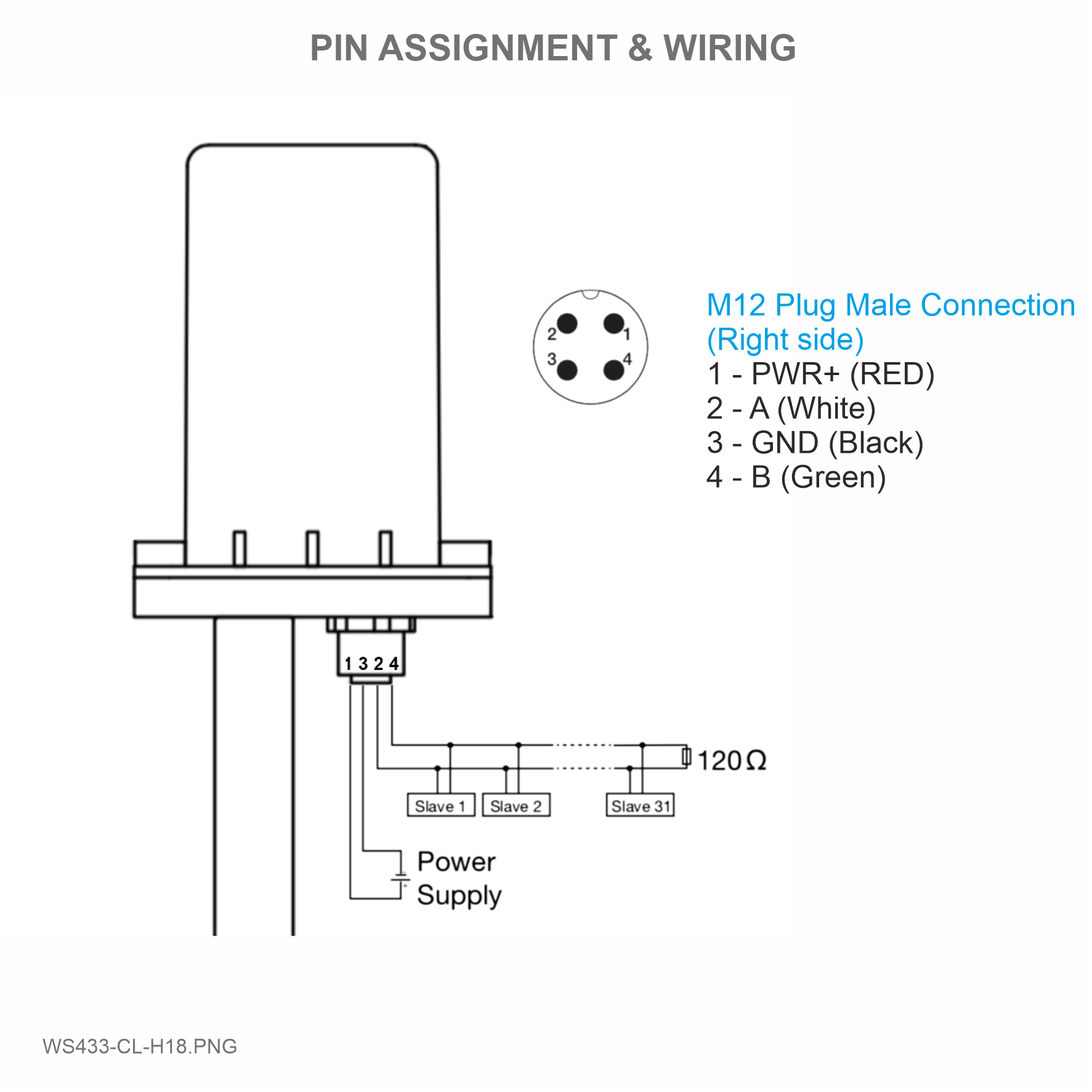
Step 1: Connect Antenna, RS485 - configuration cable and power supply co-ordinator
 |
|
 |
 |
Step 2: Open Modbus tool on PC
- You can download Daviteq Modbus Configuration Tool with the following link:
https://filerun.daviteq.com/wl/?id=yDOjE5d6kqFlGNVVlMdFg19Aad6aw0Hs
Template File: https://filerun.daviteq.com/wl/?id=BOfpTe7woBFbNULuHqsLhlJI4GmZ33fi
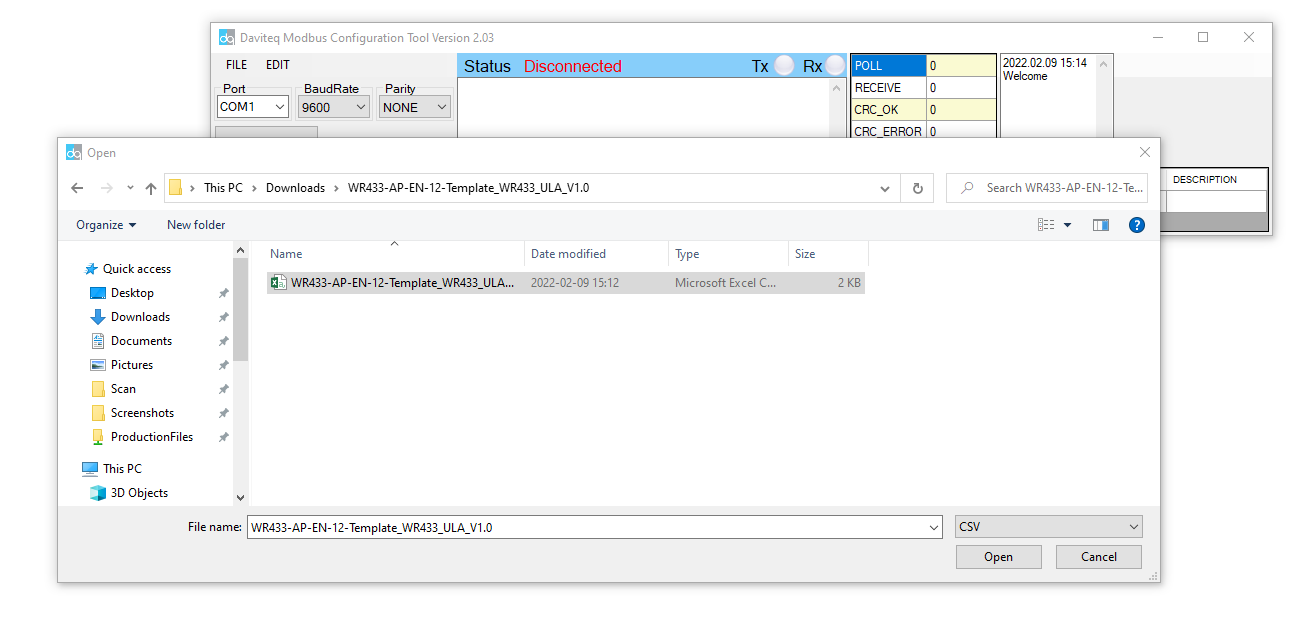
How to use the Modbus configuration software
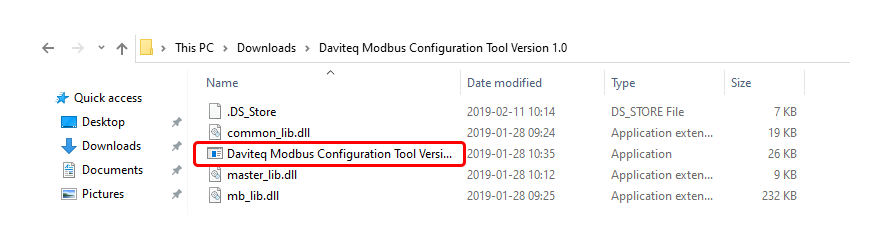
- Unzip file and run file application "Daviteq Modbus Configuration Tool Version"
- Choose COM Port (the Port which is USB cable plugged in)
- Set the BaudRate: 9600, Parity: none
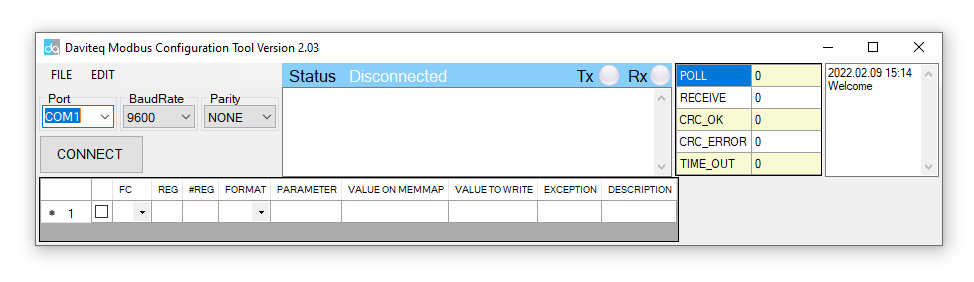
- Click “ Connect “ untill the Status displays “disconnected” to “connected“. It means the WS433-CL-04 is being connected with computer;
- Next, we need to import the configuration file for WS433-CL-04 by importing the csv file: Go to MENU: FILE / Import New / => select the template file.
Step 3: Configure parameters of the sensor.
Memmap resgisters
You can download Modbus Memmap of WS433-CL with the following link:
https://filerun.daviteq.com/wl/?id=BKEaUzdArkoc0Hc7nfpRShdPVToVrqQZ
In the memmap file, refer to the Memmap of WS433-ULA sheet to configure the sensor's operating parameters accordingly.
The reference memmap addresses are based on the order of the sensors added in the Memmap file above
Typical sensor parameters:
|
Function Code (Read) |
Function Code (Write) |
# of register |
Byte Size |
Description |
Value Range |
Default |
Format |
Property |
Explanation |
|
4 |
|
1 |
2 |
%Battery of sensor Node |
10,30,60,99 |
|
uint16 |
Read |
Battery level, only 04 levels: 10%, 30%, 60% and 99% (full). When 10% ==> Need to replace the battery |
|
4 |
2 |
4 |
Level value of sensor Node (parameter 1) |
mm |
float |
Read |
Value from ultrasonic level sensor. This value is parameter 1 of a wireless sensor node |
||
|
4 |
1 |
2 |
Status bytes of sensor Node |
uint16 |
Read |
Hi-Byte is error code, Lo-Byte is sensor type |
|||
|
4 |
2 |
4 |
Distance value of sensor Node (parameter 2) |
mm |
float |
Read |
Value from ultrasonic level sensor. This value is parameter 2 of a wireless sensor node |
||
|
4 |
1 |
2 |
Logic status of parameters |
uint16 |
Read |
Hi-Byte is Logic status of parameter 1, Lo-Byte is Logic status of parameter 2 |
|||
|
3 |
1 |
2 |
Data status of Node |
0-9, 99 |
byte |
Read |
0-9: Interval updated data 99: Disconnected |
||
|
3 |
1 |
2 |
RF Signal strength of Node |
0-4 |
byte |
Read |
From 0 to 4 with 0 is being lost connection RF and 4 is the strongest RF |
||
|
3 |
16 |
1 |
2 |
Cycle_wakeup |
1-3600(s) |
120 |
uint16 |
Read / Write |
Every time interval of Cycle_wakeup, sensor node would ONLY send data to co-ordinator if the new measured value was changed more than the Delta value of the last measured value. Default Cycle_wakeup is 120 seconds |
|
3 |
16 |
1 |
2 |
Cycle_healthsta |
60-7200(s) |
600 |
uint16 |
Read / Write |
Every time interval of Cycle_healthsta, sensor node will absolutely send data to co-ordinator regardless any condition |
|
3 |
16 |
2 |
4 |
Co-ordinator id |
0 |
uint32 |
Read / Write |
Configure the ID number of Co-ordinator that wireless sensor want to connect to the Co-ordinator when only adding the sensor manually |
|
|
3 |
16 |
2 |
4 |
Radio frequency |
433.05-434.79, 433 Mhz |
433.92 |
float |
Read / Write |
Configure the operating frequency of wireless sensor by Co-ordinator, should be configured from 433.05-434.79 MHz, only for advanced users |
|
3 |
16 |
1 |
2 |
Tx power |
-10,10,15 |
15 |
int16 |
Read / Write |
Configure the RF power of wireless sensor by Co-ordinator, only for advanced users |
|
3 |
16 |
1 |
2 |
Data rate RF |
0-1 |
0 |
uint16 |
Read / Write |
Configure the air data rate of wireless sensor by Co-ordinator, only for advanced users |
|
3 |
16 |
2 |
4 |
a1 |
1 |
float |
Read / Write |
Scale value of parameter_1 = (a1 * Raw sensor value of parameter_1) + b1. For sensor value scale |
|
|
3 |
16 |
2 |
4 |
b1 |
0 |
float |
Read / Write |
Scale value of parameter_1 = (a1 * Raw sensor value of parameter_1) + b1. For sensor value scale |
|
|
3 |
16 |
2 |
4 |
a2 |
1 |
float |
Read / Write |
Scale value of parameter_2 = (a2 * Raw sensor value of parameter_2) + b2. For sensor value scale |
|
|
3 |
16 |
2 |
4 |
b2 |
0 |
float |
Read / Write |
Scale value of parameter_2 = (a2 * Raw sensor value of parameter_2) + b2. For sensor value scale |
|
|
3 |
16 |
2 |
4 |
Delta_1 |
0 |
float |
Read / Write |
Delta value, this is the threshold to allow sending data to co-ordinator when the new value of parameter 1 is changed from the last value a delta value which is higher than the threshold. |
|
|
3 |
16 |
2 |
4 |
High_threshold_1 |
0 |
float |
Read / Write |
High threshold value for parameter 1 |
|
|
3 |
16 |
2 |
4 |
Low_threshold_1 |
0 |
float |
Read / Write |
Low threshold value for parameter 1 |
|
|
3 |
16 |
2 |
4 |
High_threshold_2 |
0 |
float |
Read / Write |
High threshold value for parameter 2 |
|
|
3 |
16 |
2 |
4 |
Low_threshold_2 |
0 |
float |
Read / Write |
Low threshold value for parameter 2 |
|
|
3 |
16 |
1 |
2 |
Num_of_sample |
|
float |
Read / Write |
Number of sampling times |
7. Installation
7.1 Installation location
Wireless sensor utilize the ultra-low power 433Mhz RF signal to transmit/receive data with Wireless co-ordinator.
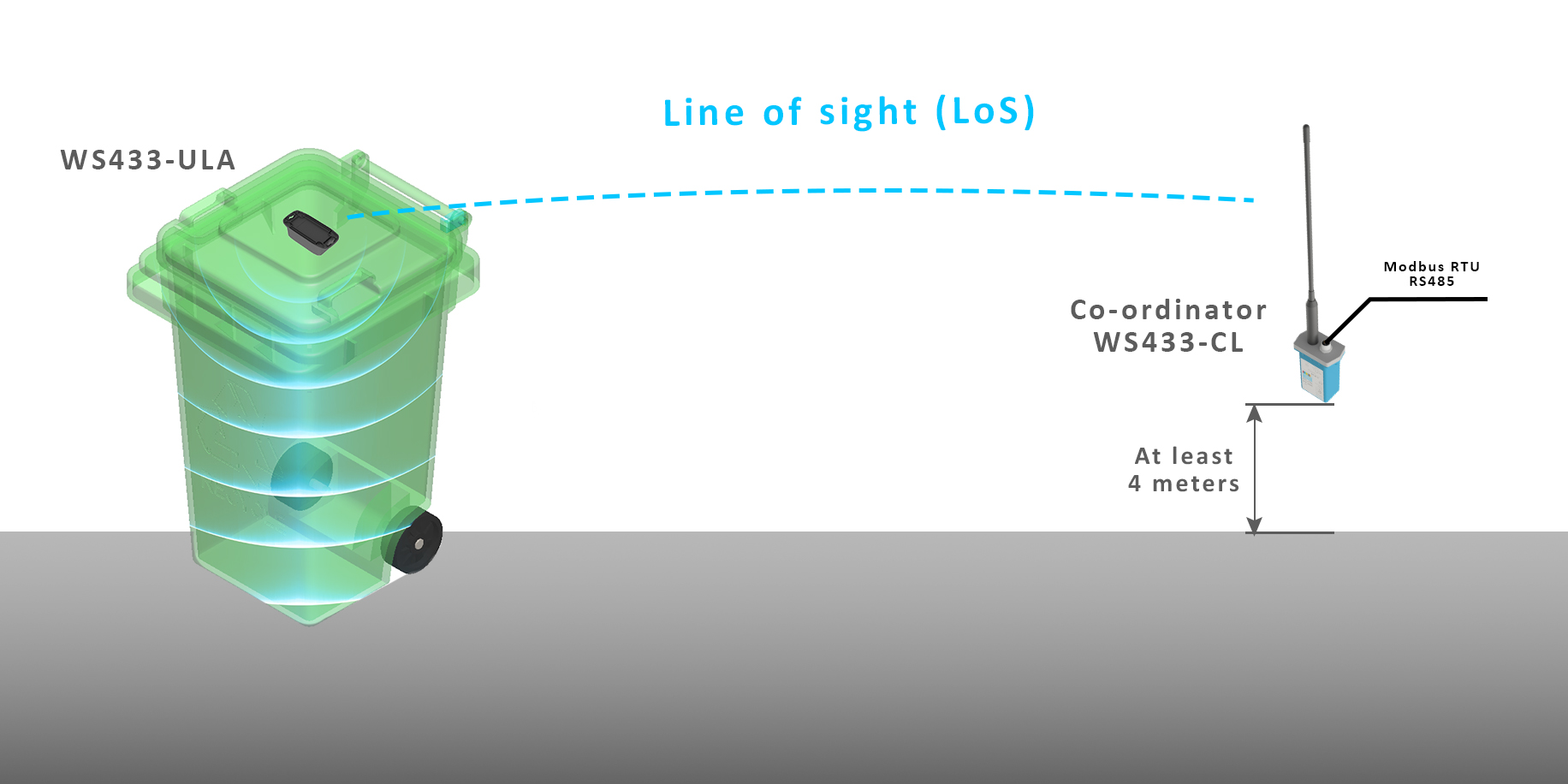
To maximize the distance of transmission, the ideal condition is Line-of-sight (LOS) between the Wireless sensor and Gateway. In real life, there may be no LOS condition. However, the two modules still communicate each other, but the distance will be reduced significantly.
ATTENTION:
DO NOT cover the Wireless sensor or its antenna inside a completed metallic box or housing, because the RF signal can not pass through the metallic material.
NOTE:
Integrated WS433-CL / iConnector Coordinator The coordinator must be placed at least 4 meters above the ground and the WS433-ULA clearly visible.
7.2 Mounting
7.2.1 Installation method
Mounting the sensor under the bottom and at the center of the trash bin lid
WARNING:
Avoid causing strong impact on the 2 probes on the sensor;
DO NOT install the sensor in complete metal trash bin because the signal can't transmit to the WS433-CL
Step 1: Determine the center of the trash bin
Step 2: Mounting the sensor under the trash bin lid by fasten the 4 screws that are included

7.2.2 Installation conditions
Align the sensor so that it is vertical to the solid surface (1)
When installing, do not let the plastic bag inflate too much to block the path of the sensor. (2)

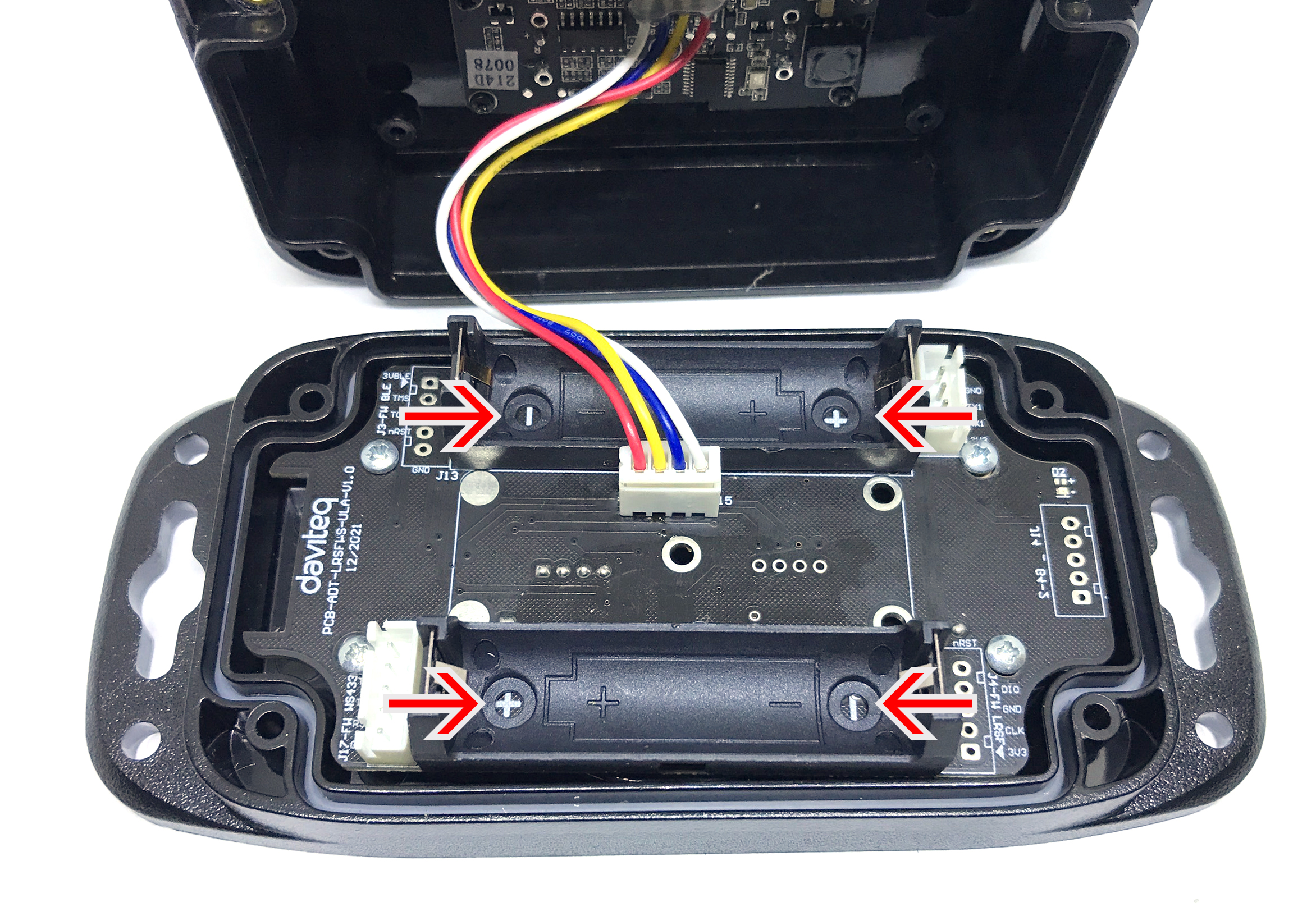
7.3 Battery installation
Steps for battery installation:
Step 1: Using Philips screw driver to unscrew 4 screws under the housing.

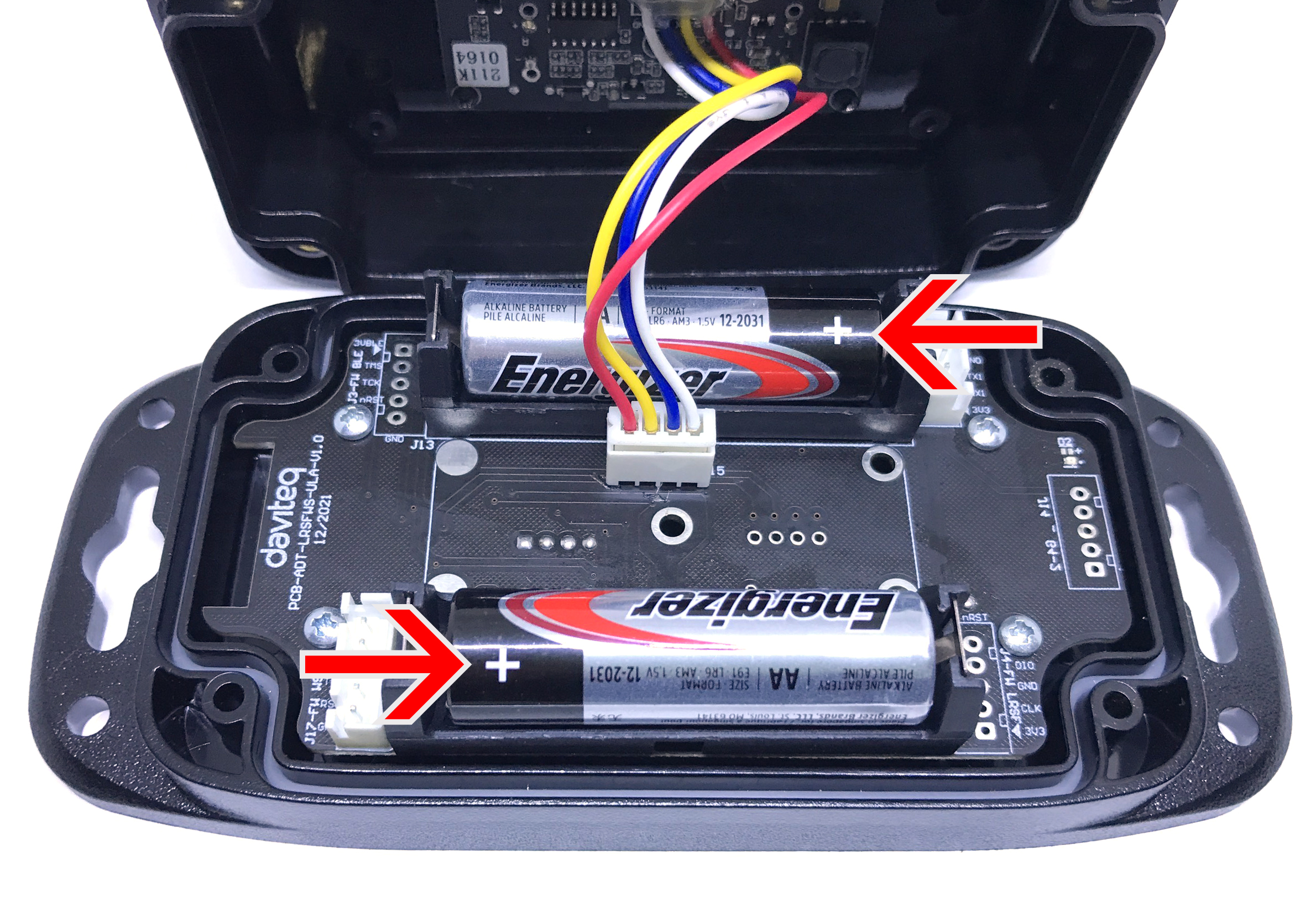
Step 2: Pull out the cover then insert 02 x AA 1.5VDC battery, please take note the poles of the battery.
ATTENTION: REVERSED POLARITY OF BATTERIES IN 10 SECONDS CAN DAMAGE THE SENSOR CIRCUIT !
Step 3: Insert the top plastic housing and locking the cover
7. Troubleshooting
| No. | Phenomena | Reason | Solutions |
| 1 | The status LED of wireless sensor doesn't light up |
|
|
| 2 | Wireless sensor not connected to co-ordinator |
|
|
8. Support contacts
|
Manufacturer
Daviteq Technologies Inc Email: info@daviteq.com | www.daviteq.com |
Distributor in Australia and New Zealand
Templogger Pty Ltd Tel: 1800 LOGGER Email: contact@templogger.net |

No Comments