Manual for Sigfox-Ready Ultrasonic Level Sensor for Trash bin - WSSFC-ULA | FW2
THIS IS OBSOLETE MANUAL
Please access https://www.iot.daviteq.com/wireless-sensors for updated manual
Thank you very much for choosing Daviteq Wireless Sensors. We are the leading wireless sensor manufacturer in the World. We have a wide range of wireless sensors which support different connectivity like LoRaWAN, Sigfox, Sub-GHz, NB-IoT...Please find out more information at this link.
This manual is applied to the following products
| Item code | HW Version | Firmware Version | Remarks |
| WSSFC-ULA-01 | 2 | 2 |
Information Changes in this version v.s previous version
| Item | Changes | Changed by | Changed Date | Approved by | Approved Date |
| 1 | Initial version | D.Q.Tuan | 01-08-2022 | N.V.Loc | 24-08-2022 |
To use this product, please refer step by step to the below instructions.
1. Quick Guide
Reading time: 10 minutes
Finish this part so you can understand and put the sensor in operation with the default configuration from the factory.
1.1 What is the Sigfox-Ready Ultrasonic Level Sensor for Trash bin and its principle of operation?
WSSFC-ULA is a Sigfox-Ready sensor with an integrated ultrasonic level sensor that can measure the waste level in the trash bin. It can be installed in the trash bin with heights from 45 cm to 450 cm.
It is battery-operated and able to connect to any Sigfox network in the World. It supports all frequency zones such as RC1, RC2, RC3c, RC4, RC5, RC6, and RC7.
For the principle operation of the ULA Ultrasonic level sensor, please refer to this link.
1.1.1 What are the typical applications of this sensor?
Please refer to this link for typical applications.
1.1.2 When does the device send uplink messages?
The device will send uplink messages in the following cases:
- Case 1: After power-up in the 60s, the device will send the first message called START_UP. The payload will tell the user the HW version, FW version, and current configuration of the device;
- Case 2: Then, in every interval time (pre-configured), for example, 30 minutes, it will send the message called CYCLIC_DATA. The payload will tell the user the following data like measured value (Distance and Level), battery level, alarm status...
To change the cycle of data sending, you can change the value of the parameter: CYCLIC_DATA_PERIOD (default is 1800 seconds).
- Case 3: If the Alarm function was enabled (in the configuration of the sensor), if the measured value passed the threshold, it will send the uplink message immediately. This message is called ALARM. The payload also tells the user the data like measured value (distance and level), battery level, alarm status...
The alarm thresholds can be changed via downlink or offline tools.
- Case 4: The HEART_BEAT uplink message will be sent once a day (the default setting can be changed in configuration) to allow the Sigfox back-end system can send the downlink message for changing the configuration of the sensor. Please refer to the downlink section for more details. The uplink payload will tell the user the HW version, FW version, and current configuration of the device;
- Case 5: During commissioning, testing, or calibration sensor, the user can force the device to send the uplink message to get the data immediately. This message is called FORCE_DATA. The payload will provide data like distance from the sensor to waste, waste level, battery level, alarm status... It can be forced by applying the magnet key on the reed switch in 1s;
- Case 6: If users want to change the configuration immediately, they don't need to wait up to 1 day for the HEART_BEAT message; instead they can force the device to send a special uplink message so that the device can get the new downlink message. This uplink message is named PARAMETERS_UPDATE. It can be forced by applying the magnet key in more than 5s.
1.1.3 The important configuration parameters
The sensor was pre-configured at the factory with default values for configuration parameters that meet the most use cases. However, depending on the specific use case, the customer can adjust those parameters. Please refer to section 3.2 for more details.
1.1.4 What kind of battery is used for this sensor?
The sensor is powered by 2 x AA 1.5V batteries for many years of operation. We recommend using Energizer L91 battery which is very popular and high performance. This battery has a capacity of up to 3500mAh with a working temperature range from -40 to +60 oC. The instruction for installing the batteries is in this link.
For Battery life estimation, please refer to this link.
1.2 What's in the package?
The package includes:
01 x Main device
01 x Magnet key
01 x set of stainless steel bolts and nuts

1.3 Quick Test
With the default configuration, the device can quickly connect to the Sigfox Network by the following steps.
Step 1: Prepare the values of communication settings:
|
Device ID |
Get Devive ID on the device nameplate |
|
Device PAC |
Get Devive PAC on the device nameplate |
Note: All Sigfox sensors are pre-configured with the correct RC before delivery. The settings of Device ID, Device PAC, and RC could also be read from the device memory map. Please reference section 3.2 Sensor configuration for details.
Step 2: Add the device to Sigfox Backend
Please refer to this link for details
Step 3: Install the batteries to the device
Please refer to this link for instructions on battery installation.
After installing the battery in 60 seconds, the first data packet will be sent to the Sigfox network. After receiving the first data packet, the time of another packet depends on the value of the parameter: CYCLIC_DATA_PERIOD. Additionally, you can use a Magnet Key to force the device to send data instantly.
Step 4: Decode the payload of receiving package
Please refer to section 1.4 Uplink Payload and Data Decoding for details of decoding the receiving packet to get the measured values.
1.4 Uplink Payload and Data Decoding
For the Uplink Payload structure, please refer to this link.
Note: Please select the right Payload document to suit the FW version of the sensor
1.5 Sensor Installation
SAFETY ATTENTION:
- ONLY REPLACE BATTERIES IN THE SAFE AREA WHERE THERE ARE NO FLAMMABLE GAS OR VAPOR
DIMENSIONS OF PRODUCT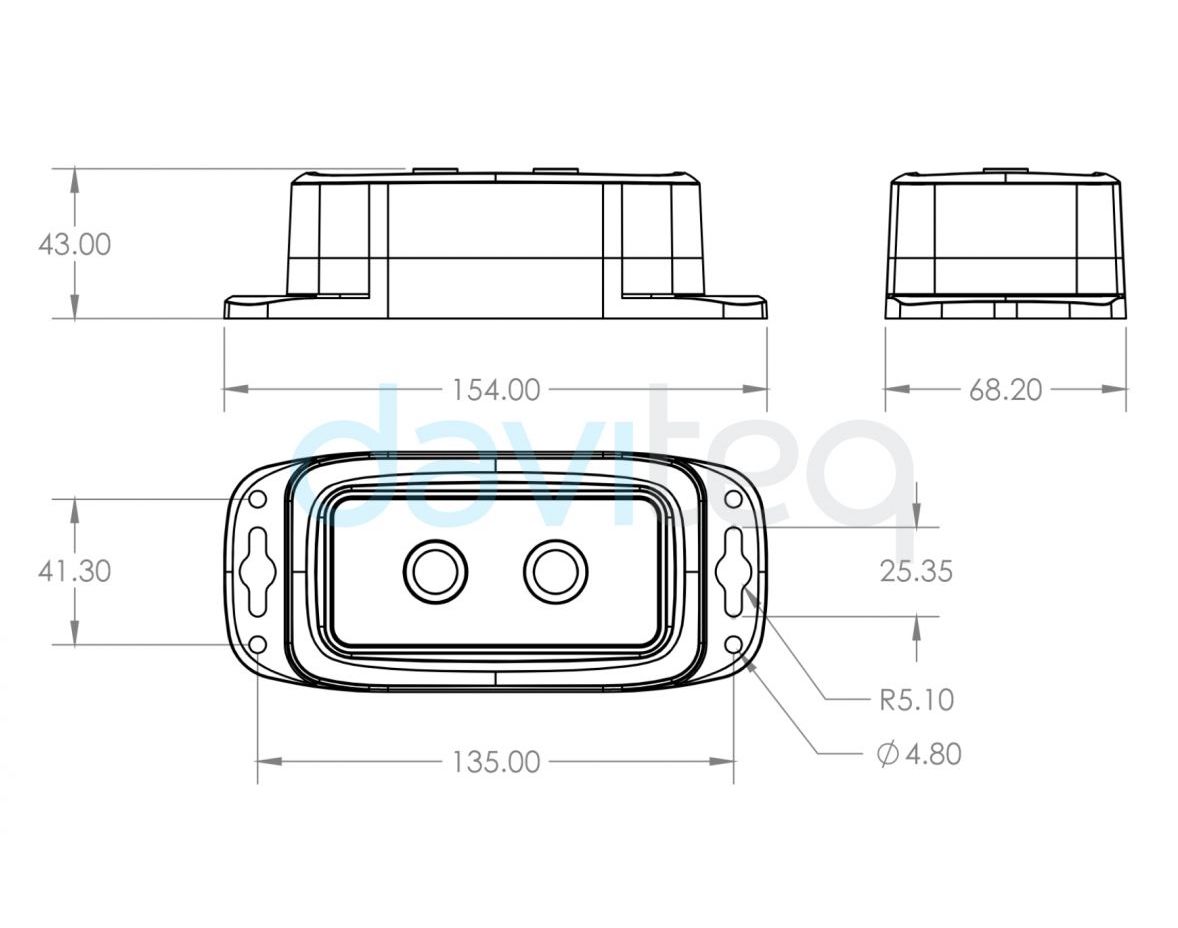
1.5.1 Battery insertion
Please refer to this link for instructions.
1.5.2 Mounting sensor in trash bin
Locate the place to mount the sensor:
- The sensor must be mounted on the top of the trash bin;
- The sensor surface must be facing down to the bottom of the trash bin;
Notes:
* The sensor must not be installed in a complete metallic trash bin as the RF signal cannot pass thru the metallic wall;
* The sensor can be mounted on the movable lid. The lid will be closed all the time, it will be opened in a short time;
Please refer below to some examples of the installation.
|
MOUNTING SENSOR ON THE FIXED TOP WALL OF TRASH BIN
|
MOUNTING SENSOR ON THE MOVABLE LID OF TRASH BIN
|
|
MOUNTING SENSOR ON THE MOVABLE LID OF TRASH BIN
|
MOUNTING SENSOR ON THE OPEN-STYLE TRASH BIN
|



To get a strong RF signal, please refer to this link.
1.5.3 Sensor calibration
The Sigfox-Ready Ultrasonic level sensor is produced with accuracy as published in the specification of the product and is ready to use. However, the user may need to configure the A & B factor to give the output as the actual level of waste in the trash bin. The A & B factor will be calculated as the instructions in this link.
2. Maintenance
2.1 Troubleshooting
- Problems with Sigfox communication like not receiving the packets...please refer to this link to troubleshoot the device.
- Problems with the sensor functions like not measuring or inaccurate measuring....please refer to this link to troubleshoot the sensor part.
2.2 Sensor maintenance
| Maintenance works | Yes/No |
Descriptions |
| Consumable parts replacement | No |
The Sigfox-Ready Ultrasonic level sensor has no consumable parts, so there is no need to replace any parts. |
| Cleaning sensor or device | Yes |
As the sensor is installed in the trash bin, it is needed to clean the device and the transducer surface by cleaning water with a soft detergent. Please do not use strong detergent or chemical solvents to clean as they can damage the transducer surface. |
| Re-calibration / Re-validation | Yes | The transducer may need to be re-calibrated when necessary. Please refer to this link for the procedure of calibration. |
3. Advanced Guide
3.1 Operating principle of the Sigfox-Ready Ultrasonic level sensor
3.1.1 Operating principle of the complete device
The Daviteq Sigfox-Ready Ultrasonic level sensor comprises 02 parts connected together:
- The Daviteq Sigfox-Ready wireless transmitter;
- The Daviteq Ultrasonic level transducer;
The Ultrasonic level transducer measures the average distance from the sensor surface to the waste surface in the trash bin.
The Sigfox-Ready wireless transmitter is to read the distance value from the transducer and perform the scaling (A and B values, during calibration). The scaled value will indicate the level of % level of waste in the trash bin.
Level = A x Distance + B
Where:
A: Constant A
B: Constant B
Note: the minimum distance that the transducer can detect is 3cm, it is called the blind zone of the sensor.
3.1.2 Operating principle of Ultrasonic level sensor ULA
To understand how the ULA ultrasonic level sensor can measure the distance from the sensor to the object, please refer to this link for a complete understanding of this measuring technique.
3.1.3 Some important configuration parameters
Below are some important configuration parameters which affect the operation of the device like battery life, measurement accuracy, and alert threshold.
For Battery life estimation, please refer to this link.
- measure_period | Default =1800s
This is the time period for the wireless transmitter to wake up and take the measurement from the transducer. The default value is 1800s. Users can reduce this value, but smaller value, shorter battery life! - cyclic_data_period | Default = 1800s
Interval time to send an uplink message regardless of any conditions - sensor_boot_time | Default = 500mS
This value will affect the measurement accuracy. DO NOT change this value!
- num_of_sample | Default = 30
The higher value, the more filtering. This filtering can eliminate the errors caused by the un-uniformed surface of the waste and/or the moving of the lid. This value will affect the measurement accuracy. DO NOT change this value!
Those configuration parameters can be changed by downlink or offline tools. For more other configuration parameters, please refer to the next section.
3.2 Sensor Configuration
3.2.1 How to configure the Sigfox-Ready Ultrasonic level sensor?
Sensor configuration can be configured in 02 methods:
- Method 1: Configuring via Downlink message. Please find the instructions in this link, but please take note of the FW version of the Document.
- Method 2: Configuring via offline cable.
Note: THE SENSOR IS ONLY ACTIVE FOR OFFLINE CONFIGURATION IN THE FIRST 60 SECONDS SINCE POWER UP BY BATTERY OR PLUGGING THE CONFIGURATION CABLE.
3.2.2 What parameters of the device are configured?
- Some parameters are read-only, and some are read and writeable.
- To read the parameters, use the off-line cable as above instruction.
- Via uplink message, users can read only one parameter, which is the CURRENT_CONFIGURATION.
Below tables are the lists of the parameters of the device.
Read-only Parameter Table
|
Modbus Register (Decimal) |
Modbus Register (Hex) |
Function Code (Read) |
No. of Registers |
Description |
Range |
Format |
Property |
Comment |
|
2 |
2 |
3 |
4 |
FW_VERSION |
|
string |
Read |
|
|
6 |
6 |
3 |
2 |
HW_VERSION |
|
string |
Read |
|
|
8 |
8 |
3 |
2 |
DEVICE_ID |
|
hex |
Read |
Product ID |
|
10 |
A |
3 |
4 |
DEVICE_PAC |
|
hex |
Read |
Product PAC |
|
14 |
E |
3 |
1 |
SENSOR_TYPE |
1-255 |
uint16 |
Read |
Sensor or Input Type |
Read/Write Parameter Table
|
Modbus Register (Decimal) |
Modbus Register (Hex) |
Function Code (Read) |
Function Code (Write) |
No. of Registers |
Description |
Range |
Default |
Format |
Property |
Comment |
|
270 |
10E |
3 |
16 |
4 |
CURRENT_CONFIGURATION |
|
|
hex |
Read/Write |
Check the Payload Document section: 5. Payload for downlink message for more information |
|
274 |
112 |
3 |
16 |
1 |
SERVER_CONFIG |
|
|
uint16 |
Read/Write |
0: Send to Sigfox Network 1: Send to Dongle |
|
276 |
114 |
3 |
16 |
1 |
RADIO_CONFIG |
1-4 |
4 |
uint16 |
Read/Write |
RC zones selection 1, 2 , 3, 4 is RC1, RC2, RC3s, RC4 |
|
277 |
115 |
3 |
16 |
1 |
TX_POWER |
|
20 |
int16 |
Read/Write |
RF Tx power |
|
278 |
116 |
3 |
16 |
2 |
CONSTANT_A |
|
1 |
float |
Read/Write |
Constant a for scaling measured value |
|
280 |
118 |
3 |
16 |
2 |
CONSTANT_B |
|
0 |
float |
Read/Write |
Constant b for scaling measured value |
|
282 |
11A |
3 |
16 |
2 |
HIGH_CUT |
|
1E+09 |
float |
Read/Write |
High cut value for the calculated value |
|
284 |
11C |
3 |
16 |
2 |
LOW_CUT |
|
0,5 |
float |
Read/Write |
Low cut value for the calculated value |
|
286 |
11E |
3 |
16 |
2 |
SENSOR_BOOT_TIME |
|
500 |
uint32 |
Read/Write |
Boot time of sensor/input, in ms |
|
306 |
132 |
3 |
16 |
1 |
NUM_OF_SAMPLE |
|
30 |
uint16 |
Read/Write |
A number of samples for filtering function. The higher value, the more filtering |
3.3 Calibration for Sigfox-Ready Ultrasonic Level Sensor
Please refer to this link.
4. Product specification
Please refer to the detailed specifications in this link.
5. Warranty and Support
For warranty terms and support procedures, please refer to this link.
6. References
Use-cases:
Case studies:
White-papers:
END.
No Comments